

\documentclass[11pt]{article}
\usepackage[utf8]{inputenc}
\usepackage{listings}
\usepackage{amsmath}
\usepackage{amssymb}
\begin{document}
The load current is assumed continuous because of an inductive load. We define the state variables (i.e., capacitor volatges, inductor currents and load current) as a vector,
\begin{align}
x(t) = \left[ \begin{array}{c}
i_{L1}(t)\\
i_{L2}(t)\\
v_{C1}(t)\\
v_{C2}(t)\\
i_l(t)
\end{array}\right]
\end{align}
Recall that the input voltage $V_g$ is an independent voltage source and the load impedence is $Z_l = R_l + sL_l$. Apparently, the load is short-circuited by $S_2$ in Mode 1.\\
The circuit equations in Mode 1 can be written in the state space form $K\dot{x} = A_1\cdot x + B_1\cdot u$, that is,
\begin{align}
\left[ \begin{array}{ccccc}
L_1 & 0 & 0 & 0 & 0\\
0 & L_2 & 0 & 0 & 0\\
0 & 0 & C_1 & 0 & 0\\
0 & 0 & 0 & C_2 & 0\\
0 & 0 & 0 & 0 & L_l \end{array} \right] \frac{d}{dt} \left[ \begin{array}{c}
i_{L1}(t)\\
i_{L2}(t)\\
v_{C1}(t)\\
v_{C2}(t)\\
i_l(t)
\end{array}\right] = \left[ \begin{array}{ccccc}
0 & 0 & 1 & 0 & 0\\
0 & 0 & 0 & 1 & 0\\
-1 & 0 & 0 & 0 & 0\\
0 & -1 & 0 & 0 & 0\\
0 & 0 & 0 & 0 & -R_l
\end{array} \right] \left[ \begin{array}{c}
i_{L1}(t)\\
i_{L2}(t)\\
v_{C1}(t)\\
v_{C2}(t)\\
i_l(t) \end{array} \right]
\end{align}
\\where
$$ K = \left[ \begin{array}{ccccc}
L_1 & 0 & 0 & 0 & 0\\
0 & L_2 & 0 & 0 & 0\\
0 & 0 & C_1 & 0 & 0\\
0 & 0 & 0 & C_2 & 0\\
0 & 0 & 0 & 0 & L_l \end{array} \right], A_1= \left[ \begin{array}{ccccc}
0 & 0 & 1 & 0 & 0\\
0 & 0 & 0 & 1 & 0\\
-1 & 0 & 0 & 0 & 0\\
0 & -1 & 0 & 0 & 0\\
0 & 0 & 0 & 0 & -R_l
\end{array} \right] and\ B_1 = \left[\begin{array}{c}
0\\
0\\
0\\
0\\
0 \end{array} \right]$$
\\
The equations in Mode 2 can be expresses in the state space form \\ $K\dot{x} = A_2\cdot x c+ B_2\cdot u$ , that is
\begin{align*}
\left[\begin{array}{ccccc}
L_1 & 0 & 0 & 0 & 0\\
0 & L_2 & 0 & 0 & 0\\
0 & 0 & C_1 & 0 & 0\\
0 & 0 & 0 & C_2 & 0\\
0 & 0 & 0 & 0 & L_l\\
\end{array}\right] \frac{d}{dt} \left[\begin{array}{c}
i_{L1}(t)\\
i_{L2}(t)\\
v_{C1}(t)\\
v_{C2}(t)\\
i_l(t)\\
\end{array} \right] &= \left[\begin{array}{ccccc}
0 & 0 & 0 & -1 & 0\\
0 & 0 & -1 & 0 & 0\\
0 & 1 & 0 & 0 & -1\\
1 & 0 & 0 & 0 & -1\\
0 & 0 & 1 & 1 & -R_l\\
\end{array} \right] \left[\begin{array}{c}
i_{L1}(t)\\
i_{L2}(t)\\
v_{C1}(t)\\
v_{C2}(t)\\
i_l(t)\\
\end{array} \right] + \\
&\left[\begin{array}{c}
1\\
1\\
0\\
0\\
-1 \end{array} \right] (v_g(t) - V_D)
\end{align*}
错误:公式的编号没有连续
答案1
如果您希望方程式被标记,请不要使用align*星号。我建议输入以下内容。(您可能还想看看split,\notag以及此主页上显示长方程式拆分的所有数百篇帖子。
请注意,我已将所有数组更改为bmatrix。这可使间距更好,括号大小更稳定。您应该将它们用于此类目的。
显示数学形式$$...$$仅应在纯 TeX 中使用。
% arara: pdflatex
\documentclass[11pt]{article}
\usepackage[utf8]{inputenc}
\usepackage{mathtools}
\begin{document}
The load current is assumed continuous because of an inductive load. We define the state variables (i.e., capacitor voltages, inductor currents and load current) as a vector,
\begin{equation}
x(t) =
\begin{bmatrix}
i_{L1}(t)\\
i_{L2}(t)\\
v_{C1}(t)\\
v_{C2}(t)\\
i_l(t)
\end{bmatrix}
\end{equation}
Recall that the input voltage $V_g$ is an independent voltage source and the load impedance is $Z_l = R_l + sL_l$. Apparently, the load is short-circuited by $S_2$ in Mode 1.
The circuit equations in Mode 1 can be written in the state space form $K\dot{x} = A_1\cdot x + B_1\cdot u$, that is,
\begin{equation}
K \frac{\mathrm{d}}{\mathrm{d}t}
\begin{bmatrix}
i_{L1}(t)\\
i_{L2}(t)\\
v_{C1}(t)\\
v_{C2}(t)\\
i_l(t)
\end{bmatrix}
= A_1
\begin{bmatrix}
i_{L1}(t)\\
i_{L2}(t)\\
v_{C1}(t)\\
v_{C2}(t)\\
i_l(t)
\end{bmatrix}
\end{equation}
where
\begin{align*} K &=
\begin{bmatrix}
L_1 & 0 & 0 & 0 & 0 \\
0 & L_2 & 0 & 0 & 0 \\
0 & 0 & C_1 & 0 & 0 \\
0 & 0 & 0 & C_2 & 0 \\
0 & 0 & 0 & 0 & L_l
\end{bmatrix},\\
A_1 &=
\begin{bmatrix}
0 & 0 & 1 & 0 & 0 \\
0 & 0 & 0 & 1 & 0 \\
-1 & 0 & 0 & 0 & 0 \\
0 & -1 & 0 & 0 & 0 \\
0 & 0 & 0 & 0 & -R_l
\end{bmatrix},\\
\shortintertext{and}
B_1 &=
\begin{bmatrix}
0\\
0\\
0\\
0\\
0
\end{bmatrix}.
\end{align*}
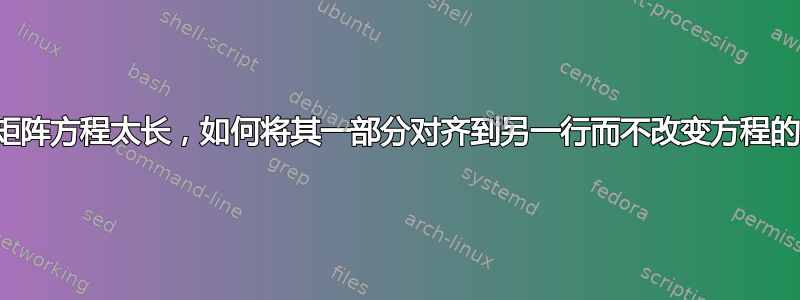
The equations in Mode 2 can be expressed in the state space form $K\dot{x} = A_2\cdot x c+ B_2\cdot u$ , that is
\begin{multline}
\begin{bmatrix}
L_1 & 0 & 0 & 0 & 0 \\
0 & L_2 & 0 & 0 & 0 \\
0 & 0 & C_1 & 0 & 0 \\
0 & 0 & 0 & C_2 & 0 \\
0 & 0 & 0 & 0 & L_l \\
\end{bmatrix} \frac{\mathrm{d}}{\mathrm{d}t}
\begin{bmatrix}
i_{L1}(t) \\
i_{L2}(t) \\
v_{C1}(t) \\
v_{C2}(t) \\
i_l(t) \\
\end{bmatrix}\\
=
\begin{bmatrix}
0 & 0 & 0 & -1 & 0 \\
0 & 0 & -1 & 0 & 0 \\
0 & 1 & 0 & 0 & -1 \\
1 & 0 & 0 & 0 & -1 \\
0 & 0 & 1 & 1 & -R_l \\
\end{bmatrix}
\begin{bmatrix}
i_{L1}(t) \\
i_{L2}(t) \\
v_{C1}(t) \\
v_{C2}(t) \\
i_l(t) \\
\end{bmatrix}
+ \begin{bmatrix}
1\\
1\\
0\\
0\\
-1 \end{bmatrix} (v_g(t) - V_D)
\end{multline}
\end{document}
