

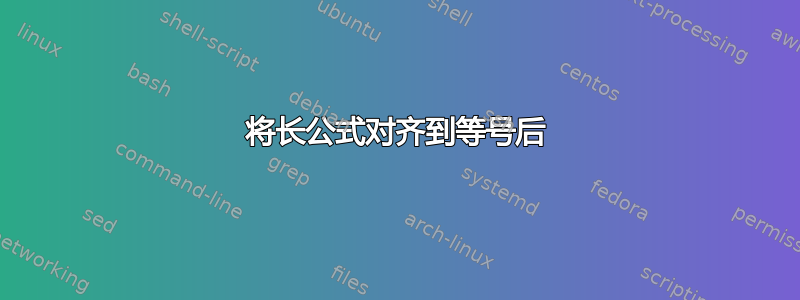
我看到这里有很多类似主题的问题,但我找不到我的问题的答案。下面是我为几个方程式编写的 latex 代码。我怎样才能强制第 2 行、第 3 行(等等)的文本出现在等号正下方?我是否也可以让 latex 在适当的位置插入换行符以实现这一点?

\documentclass{article}
\usepackage{amsmath}
\begin{document}
%41
\[
\begin{split}
\frac{d}{dt}\langle \Delta i_{fi1} \rangle_{1}^R = \omega\langle
\Delta i_{fi1} \rangle_{1}^I +\frac{1}{L_{fi1}}
\Big[\frac{2}{\pi}\Big\{(V_{dcL0})_{0}sin(2 \pi D_{i})\\+(\langle
\Delta v_{dcL} \rangle_{0} sin(2 \pi D_{i}))+(V_{dcL} cos(2 \pi
D_{i})2 \pi \Delta d_{i}) \Big\}-R_{fi} \langle i_{fi}
\rangle_{1}^R-\langle v_{cfi} \rangle_{1}^R \Big]
\end{split}
\]
%42
\[
\begin{split}
\frac{d}{dt}\langle \Delta i_{fi1} \rangle_{1}^I = -\omega\langle
\Delta i_{fi1} \rangle_{1}^R +\frac{1}{L_{fi1}}
\Big[\frac{2}{\pi}\Big\{(V_{dcL0}cos(2 \pi D_{i}))+ \\(\langle \Delta
v_{dcL} \rangle_{0} cos(2 \pi D_{i}))-(V_{dcL} sin(2 \pi D_{i})2 \pi
\Delta d_{i}) \Big\}-R_{fi} \langle i_{fi} \rangle_{1}^I-\langle
v_{cfi} \rangle_{1}^I \Big]
\end{split}
\]
% 43
\[
\begin{split}
\frac{d}{dt}\langle \Delta v_{Ci}\rangle_1^IR= \omega\langle\Delta v_{Ci}\rangle_1^I +\frac{1}{C_{fi}}\Big[ \langle\Delta i_{fi1}\rangle_1^R - \frac{\langle\Delta v_{Ci}\rangle_1^R}{R_L1}\Big]
\end{split}
\]
% 44
\[
\frac{d}{dt}\langle \Delta v_{Ci} \rangle_1^I = -\omega\langle\Delta v_{Ci}\rangle_1^R +\frac{1}{C_{fi}}\Big[ \langle\Delta i_{fi1}\rangle_1^I - \frac{\langle\Delta v_{Ci}\rangle_1^I}{R_L1}\Big]
\]
% 45
\[
\frac{d}{dt}\Big[\Delta X_{SST}\Big]=[A_{SST}][\Delta X_{SST}]+[B_{SST}][\Delta d_{SST}]
+[C_{SST}][\Delta U_{SST}]+[D_{SST}]
\]
%46
\[
\Big[\Delta X_{SST}\Big]=\Big[X_{rectifier} | X_{DAB} | X_{inverter} \Big]$$ where
\small\small $$\ X_{rectifier} = \Big[\Delta \langle i_{g} \rangle _{1}^R\hspace{0.15cm} \Delta \langle i_{g} \rangle _{1}^I\hspace{0.15cm} \Delta \langle i_{fr} \rangle _{1}^R\hspace{0.15cm} \Delta \langle i_{fr} \rangle _{1}^I\hspace{0.15cm} \Delta \langle V_{cfr} \rangle _{1}^R\hspace{0.15cm} \Delta \langle V_{cfr} \rangle _{1}^I\hspace{0.15cm} \Delta \langle V_{dcH} \rangle _{0} \Big])\normalsize$$
$$\ X_{DAB} = \Big[\Delta \langle i_{tp} \rangle _{1}^R\hspace{0.3cm} \Delta \langle i_{tp} \rangle _{1}^I\hspace{0.3cm} \Delta \langle V_{dcL} \rangle _{0}\Big]$$ and
$$\ X_{inverter}= \Big[\Delta \langle i_{fi1} \rangle _{1}^R\hspace{0.3cm} \Delta \langle i_{fr1} \rangle _{1}^I\hspace{0.3cm} \Delta \langle V_{cfi1} \rangle _{1}^R\hspace{0.3cm} \Delta \langle V_{cfi1} \rangle _{1}^I\Big]
\]
\[
\Big[\small \Delta d_{SST}\Big]=\Big[\Delta d_{r}\hspace{0.3cm}\Delta d_{D1}\hspace{0.3cm}\Delta d_{D2}\hspace{0.3cm}\Delta d_{i}\Big]\eqno{\hbox{(47)}}
\]
\end{document}
答案1
我需要花很多时间来重新安排你的 MWE ... 我强烈建议你,即使在编辑器中你也写下了方程式,这样很容易找到0和行的结束(\\)即方程式新行的开始。除此之外,对于三角函数,我建议使用\sin或\cos代替sin和cos。
为了在某些点对齐等式,例如在等号处,您应该使用与号 ( &)。
我把所有方程合并到一个系统中。对于你不喜欢有方程编号的行,我把放在\notag前面\\。此外,align我还使用multlined环境来打破更多行中的非常长的方程。结果如下:
代码:
\documentclass{article}
\usepackage{mathtools}
\begin{document}
%41
\begin{align}
\frac{d}{dt}\langle \Delta i_{fi1} \rangle_{1}^R
& = \begin{multlined}[t]
\omega\langle \Delta i_{fi1}\rangle_{1}^I +\frac{1}{L_{fi1}}
\Big[\frac{2}{\pi}\Big\{(V_{dcL0})_{0}\sin(2\pi D_{i}) \\
+(\langle\Delta v_{dcL} \rangle_{0}\sin(2 \pi D_{i}))
+(V_{dcL} \cos(2\pi D_{i}) 2\pi\Delta d_{i}) \Big\} -R_{fi}
\langle i_{fi}\rangle_{1}^R-\langle v_{cfi} \rangle_{1}^R \Big]
\end{multlined} \notag \\
%42
\frac{d}{dt}\langle \Delta i_{fi1} \rangle_{1}^I
& = \begin{multlined}[t]
-\omega\langle\Delta i_{fi1} \rangle_{1}^R + \frac{1}{L_{fi1}}q \\
(\langle \Delta v_{dcL} \rangle_{0}\cos(2 \pi D_{i}))
-(V_{dcL}\sin(2 \pi D_{i})2 \pi\Delta d_{i}) \Big\}
-R_{fi} \langle i_{fi} \rangle_{1}^I-\langle
v_{cfi} \rangle_{1}^I \Big]
\end{multlined} \notag \\
% 43
\frac{d}{dt}\langle \Delta v_{Ci}\rangle_1^IR
& = \omega\langle\Delta v_{Ci}\rangle_1^I +\frac{1}{C_{fi}}
\Big[ \langle\Delta i_{fi1}\rangle_1^R - \frac{\langle\Delta v_{Ci}\rangle_1^R}{R_L1}\Big] \notag \\
% 44
\frac{d}{dt}\langle \Delta v_{Ci} \rangle_1^I
& = -\omega\langle\Delta v_{Ci}\rangle_1^R +\frac{1}{C_{fi}}
\Big[ \langle\Delta i_{fi1}\rangle_1^I - \frac{\langle\Delta v_{Ci}\rangle_1^I}{R_L1}\Big] \notag \\
% 45
\frac{d}{dt}\Big[\Delta X_{SST}\Big]
& =[A_{SST}][\Delta X_{SST}]+[B_{SST}][\Delta d_{SST}] +[C_{SST}]
[\Delta U_{SST}]+[D_{SST}] \notag \\
%46
\Big[\Delta X_{SST}\Big]
& =\Big[X_{rectifier} | X_{DAB} | X_{inverter}\Big] \notag
\intertext{where}
X_{rectifier}
& = \Big[\Delta\langle i_{g} \rangle_{1}^R\hspace{0.15cm}
\Delta\langle i_{g} \rangle_{1}^I\
\Delta\langle i_{fr} \rangle_{1}^R\
\Delta\langle i_{fr} \rangle_{1}^I\
\Delta\langle V_{cfr}\rangle_{1}^R\
\Delta\langle V_{cfr}\rangle_{1}^I\
\Delta\langle V_{dcH}\rangle_{0}\Big] \notag \\
X_{DAB}
& = \Big[\Delta\langle i_{tp} \rangle_{1}^R\
\Delta\langle i_{tp} \rangle_{1}^I\
\Delta\langle V_{dcL}\rangle_{0}\Big] \notag \\
\intertext{and}
X_{inverter}
& = \Big[\Delta\langle i_{fi1} \rangle_{1}^R\
\Delta\langle i_{fr1} \rangle_{1}^I\
\Delta\langle V_{cfi1}\rangle_{1}^R\
\Delta\langle V_{cfi1}\rangle_{1}^I\Big] \notag \\
%
\Big[\small \Delta d_{SST}\Big]
& =\Big[\Delta d_{r} \ \Delta d_{D1}\
\Delta d_{D2}\ \Delta d_{i}\Big]
\end{align}
\end{document}
这就是你要找的吗?
答案2
我通常使用align环境。它的工作方式与表格基本相同,例如
\begin{align}
f(x) &= |x|^2\\
&= x\bar x
\end{align}
每行的所有第 n 个&符号将放置在彼此下方,并且\\是换行符。
如果你不想编号,你可以使用align*
答案3
这是一个基于 和 的解决方案align*。alignat*我flalign*将一些方程式分组到同一个环境中,这可能存在争议,并决定将拆分方程式的第二部分放在行尾。我还系统地使用了环境bmatrix,设置了适当的 值arraycolsep,而不是手动重复插入相同的长度:
\documentclass{article}
\usepackage{geometry}
\usepackage{mathtools, array}
\usepackage{showframe}
\begin{document}
%41
\begin{alignat*}{2}
\frac{d}{dt}\langle \Delta i_{fi1} \rangle_{1}^R & = & \omega \langle\Delta i_{fi1} \rangle_{1}^I + \frac{1}{L_{fi1}} \biggl[\frac{2}{\pi} & \Bigl\{(V_{dcL0})_{0}\sin(2 \pi D_{i})+ (\langle \Delta v_{dcL} \rangle_{0} \sin(2 \pi D_{i})) \\[-1.5ex]
& & & +(V_{dcL} \cos(2 \pi D_{i})2 \pi \Delta d_{i}) \Bigr\}-R_{fi} \langle i_{fi}
\rangle_{1}^R-\langle v_{cfi} \rangle_{1}^R \biggr]\\
\frac{d}{dt}\langle \Delta i_{fi1} \rangle_{1}^I & ={} & -\omega \langle \Delta i_{fi1} \rangle_{1}^R + \frac{1}{L_{fi1}} \biggl[\frac{2}{\pi} & \Bigl\{(V_{dcL0}\cos(2 \pi D_{i}))+(\langle \Delta v_{dcL} \rangle_{0} \cos(2 \pi D_{i})) \\[-1.5ex]
& & & -(V_{dcL} \sin(2 \pi D_{i})2 \pi \Delta d_{i}) \Bigr\}-R_{fi} \langle i_{fi} \rangle_{1}^I-\langle v_{cfi} \rangle_{1}^I \biggr]
\end{alignat*}
% 43
\begin{align*}
\frac{d}{dt}\langle \Delta v_{Ci}\rangle_1^IR & = \omega\langle\Delta v_{Ci}\rangle_1^I +\frac{1}{C_{fi}}\biggl[ \langle\Delta i_{fi1}\rangle_1^R - \frac{\langle\Delta v_{Ci}\rangle_1^R}{R_L1}\biggr] \\
% 44
\frac{d}{dt}\langle \Delta v_{Ci} \rangle_1^I & = -\omega\langle\Delta v_{Ci}\rangle_1^R +\frac{1}{C_{fi}}\biggl[ \langle\Delta i_{fi1}\rangle_1^I - \frac{\langle\Delta v_{Ci}\rangle_1^I}{R_L1}\biggr] \\
% 45
\frac{d}{dt}\bigl[\Delta X_{SST}\bigr] & =[A_{SST}][\Delta X_{SST}]+[B_{SST}][\Delta d_{SST}]
+[C_{SST}][\Delta U_{SST}]+[D_{SST}]
\end{align*}
%46
\begin{flalign*}
& & \Big[\Delta X_{SST}\Big] & =\Bigl[X_\mathrm{rectifier}\mid X_{DAB}\mid X_\mathrm{inverter} \Bigr] & & \\[1ex]
&
\mathrlap{\setlength\arraycolsep{4pt}\renewcommand\arraystretch{1.5}
\begin{array}[t]{@{}l@{\quad}l}
\text{where} & X_\mathrm{rectifier} =
\begin{bmatrix}\Delta \langle i_{g} \rangle _{1}^R & \Delta \langle i_{g} \rangle _{1}^I & \Delta \langle i_{fr} \rangle _{1}^R & \Delta \langle i_{fr} \rangle _{1}^I & \Delta \langle V_{cfr} \rangle _{1}^R & \Delta \langle V_{cfr} \rangle _{1}^I & \Delta \langle V_{dcH} \rangle _{0}
\end{bmatrix}\\
& X_{DAB} = \begin{bmatrix}\Delta \langle i_{tp} \rangle _{1}^R & \Delta \langle i_{tp} \rangle _{1}^I & \Delta \langle V_{dcL} \rangle _{0}\end{bmatrix} \\[2ex]
\text{and} & X_\mathrm{inverter}= \begin{bmatrix}\Delta \langle i_{fi1} \rangle _{1}^R & \Delta \langle i_{fr1} \rangle _{1}^I & \Delta \langle V_{cfi1} \rangle _{1}^R & \Delta \langle V_{cfi1} \rangle _{1}^I \end{bmatrix}
\end{array}} & &
\end{flalign*}
\[
\begin{bmatrix} \Delta d_{SST}\Big]=\Big[\Delta d_{r} & \Delta d_{D1} & \Delta d_{D2} & \Delta d_{i}\end{bmatrix}\eqno{\hbox{(47)}}
\]
\end{document}
