

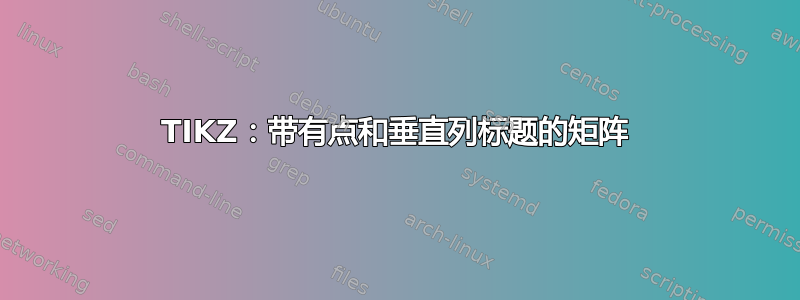
我完全被 tikz 中的这个图表难住了:

尤其是我不知道如何制作这些点。另一个问题是矩阵的标题。我实际上想用垂直文本标记每列。
任何帮助或想法都将不胜感激!
谢谢
马塞尔
答案1
这是 tikz 的代码
\documentclass[a4paper]{article}
\usepackage[left=0.2cm,right=1cm]{geometry}
\usepackage{tikz,xcolor}
\usepackage{amsmath}
\usepackage{graphicx}
\usepackage{scalerel}
\usetikzlibrary{matrix,positioning,shapes}
\tikzstyle{square}=[minimum size=0.5cm,draw]
\tikzstyle{myrec}=[rectangle, minimum width=3.1cm, minimum height=1.6cm, text centered, draw=black,text width=3cm]
\newcommand{\mydot}{\raisebox{-0.2ex}{\hspace*{-0.5mm}\LARGE\bfseries ...}}
\newcommand\xdownarrow[1][2ex]{\mathrel{\rotatebox{90}{$\xleftarrow{\rule{#1}{0pt}}$}}}
\begin{document}
\begin{center}
\begin{tikzpicture}
\def\square;{\node[square](a1){};\node[square,right of=a1,xshift=-5mm](a2){};\node[square,right of=a2,xshift=-5mm](a3){};\node[right of=a3,scale=0.7mm,xshift=-2.0mm](d1){...};\node[square,right of=d1,xshift=-4mm](d2){};\node[square,right of=d2,xshift=-5mm]{};}
\node[] at (-6.7,3.3) (b1) {$\overbrace{~~~~~~~~~~~~~~~~~~~~~~~~~~~}$};
\node[right of=b1,xshift=2.5cm] (b2) {$\overbrace{~~~~~~~~~~~~~~~~~~~~~~~~~~~}$};
\node[right of=b2,xshift=2.7cm] (b3) {$\overbrace{~~~~~~~~~~~~~~~~~~~~~~~~~~~}$};
\node[right of=b3,xshift=2.5cm] (b4) {$\overbrace{~~~~~~~~~~~~~~~~~~~~~~~~~~~}$};
\node[rotate=-90] at (6.5,0) (c) {$\overbrace{~~~~~~~~~~~~~~~~~~~~~~~~~~~~~}$};
\node[right of=c,scale=1.5,xshift=0.3cm] {Op-Code};
\node[scale=1.5,xshift=0.3cm] at (-9,0) {~~~~~~~~~~~~~};
\node[above of=b2,yshift=1cm,xshift=2cm,scale=2] {\bfseries Control Table};
\node[above of=b1,yshift=-0.3cm,text width=1.5cm,text centered] {Control Signals};
\node[above of=b2,yshift=-0.3cm,text width=2.6cm,text centered] {Micro-Sequenzer Instruction};
\node[above of=b3,yshift=-0.3cm,text width=2.6cm,text centered] {Condition Selector};
\node[above of=b4,yshift=-0.3cm,text width=2.0cm,text centered] {Branch Address};
\draw[->] (-9,1.5)-- (-8,1.5);
\node at (-10.0,1.5) {\bfseries\large Micro-PC};
\matrix (M)[matrix of math nodes,rectangle,draw,xshift=-1.3cm]
{
\square; &\hspace{-0.5mm}& \square; &\hspace*{-3.5mm}& \square;&\hspace{-0.5mm}&\square; \\
\square; &\hspace{-0.5mm}& \square; &\hspace*{-3.5mm}& \square;&\hspace{-0.5mm}&\square; \\
\square; &\hspace{-0.5mm}& \square; &\hspace*{-3.5mm}& \square;&\hspace{-0.5mm}&\square; \\
\square; &\hspace{-0.5mm}& \square; &\hspace*{-3.5mm}& \square;&\hspace{-0.5mm}&\square; \\
& & & \node[scale=0.7mm] {\vdots}; & & & \\
\square; &\hspace{-0.5mm}& \square; &\hspace*{-3.5mm}& \square;&\hspace{-0.5mm}&\square; \\
\square; &\hspace{-0.5mm}& \square; &\hspace*{-3.5mm}& \square;&\hspace{-0.5mm}&\square; \\
\square; &\hspace{-0.5mm}& \square; &\hspace*{-3.5mm}& \square;&\hspace{-0.5mm}&\square; \\
\square; &\hspace{-0.5mm}& \square; &\hspace*{-3.5mm}& \square;&\hspace{-0.5mm}&\square; \\
};
\end{tikzpicture}
\vspace{-0.7mm}
$\xdownarrow[1cm]$
\begin{tikzpicture}
\def\square;{\node[square](a1){};\node[square,right of=a1,xshift=-5mm](a2){};\node[square,right of=a2,xshift=-5mm](a3){};\node[right of=a3,scale=0.7mm,xshift=-2.0mm](d1){...};\node[square,right of=d1,xshift=-4mm](d2){};\node[square,right of=d2,xshift=-5mm]{};}
\matrix (N)[matrix of math nodes,rectangle,draw]
{
\square; &\hspace{-0.5mm}& \square; &\hspace{-0.5mm}& \square;&\hspace{-0.5mm}&\square; \\
};
\node[myrec] at (-5.2,-2.5) (r1) {Datapath};
\node[myrec,right of=r1,xshift=2.5cm] (r2) {Micro Sequenzer Instruction};
\node[myrec,right of=r2,xshift=2.5cm] (r3) {Condition Selector};
\node[myrec,right of=r3,xshift=2.5cm] (r4) {Branch Address};
\node[above of=r1,yshift=0.5cm] {$\xdownarrow[1cm]$};
\node[above of=r2,yshift=0.5cm] {$\xdownarrow[1cm]$};
\node[above of=r3,yshift=0.5cm] {$\xdownarrow[1cm]$};
\node[above of=r4,yshift=0.5cm] (side) {$\xdownarrow[1cm]$};
\node[text width=3.5cm,text centered] at (9,0) {Active Control Signals};
\node[text width=3.5cm,text centered] at (-8,0) {~~~};
\end{tikzpicture}
\end{center}
\end{document}

答案2
解决方案tikz。我使用两个循环来定位 3+2 个小方块的块。在每个块中,最左侧和最右侧的节点都有名称,可用于定位箭头和其他东西。
\documentclass[border=5mm]{standalone}
\usepackage{tikz}
\usetikzlibrary{calc,decorations.pathreplacing,fit,positioning}
\begin{document}
\begin{tikzpicture}[%
node distance=1mm and 1mm,
SmallSq/.style={inner sep=0mm,minimum size=5mm,draw},
CurlyBrace/.style={decorate,decoration={brace,amplitude=5pt}},
CurlyBraceMirror/.style={decorate,decoration={brace,amplitude=5pt,mirror}},
TextBox/.style={pos=0.5,yshift=3mm,anchor=west,rotate=90,text width=3cm},
FrameTextBox/.style={draw,text width=2.5cm, minimum width=2.8cm,minimum height=1.5cm,below,align=center},
]
\newcommand\SqRowDist{3.3}
\foreach \x in {0,1,2,3}{
\foreach \y in {-2,1,2,3,4,6,7,8,9}{
\node[SmallSq] (SqL\x\y) at (\x*\SqRowDist,\y*0.6){};
\node[SmallSq] at (\x*\SqRowDist+0.5,\y*0.6){};
\node[SmallSq] at (\x*\SqRowDist+1,\y*0.6){};
\node at (\x*\SqRowDist+1.5,\y*0.6){$\cdots$};
\node[SmallSq] at (\x*\SqRowDist+2,\y*0.6){};
\node[SmallSq] (SqR\x\y) at (\x*\SqRowDist+2.5,\y*0.6){};
}
}
\node[draw,fit=(SqL01)(SqR39)](BigSq){};
\node[draw,fit=(SqL0-2)(SqR3-2)](LowSq){};
\node at ($(SqR14.north east)!0.5!(SqL26.south west)$){$\vdots$};
%%
\draw[latex-] (SqL07.west) -- +(-1,0)node[left]{Micro PC};
\draw[CurlyBrace] ($(SqL09.north west)+(0,0.2)$)--($(SqR09.north east)+(0,0.2)$) node[TextBox]{Control signal};
\draw[CurlyBrace] ($(SqL19.north west)+(0,0.2)$)--($(SqR19.north east)+(0,0.2)$) node[TextBox]{Micro-Sequencer Instruction};
\draw[CurlyBrace] ($(SqL29.north west)+(0,0.2)$)--($(SqR29.north east)+(0,0.2)$) node[TextBox]{Condition Selector};
\draw[CurlyBrace] ($(SqL39.north west)+(0,0.2)$)--($(SqR39.north east)+(0,0.2)$) node[TextBox]{Branch Address};
%%
\draw[-latex]({$(SqL0-2)!0.5!(SqR0-2)$} |- LowSq.south) -- +(0,-1) node[FrameTextBox]{Datapath};
\draw[-latex]({$(SqL1-2)!0.5!(SqR1-2)$} |- LowSq.south) -- +(0,-1) node[FrameTextBox]{Micro-Sequencer Instruction};
\draw[-latex]({$(SqL2-2)!0.5!(SqR2-2)$} |- LowSq.south) -- +(0,-1) node[FrameTextBox]{Condition Selector};
\draw[-latex]({$(SqL3-2)!0.5!(SqR3-2)$} |- LowSq.south) -- +(0,-1) node[FrameTextBox]{Branch Address};
%%
\draw[CurlyBraceMirror] ($(SqR32.south east)+(0.2,0)$)--($(SqR37.north east)+(0.2,0)$) node[pos=0.5,xshift=3mm,right]{OP code};
\node[right] at ($(LowSq.east)+(0.2,0)$){Active Control Signals};
\end{tikzpicture}
\end{document}
