

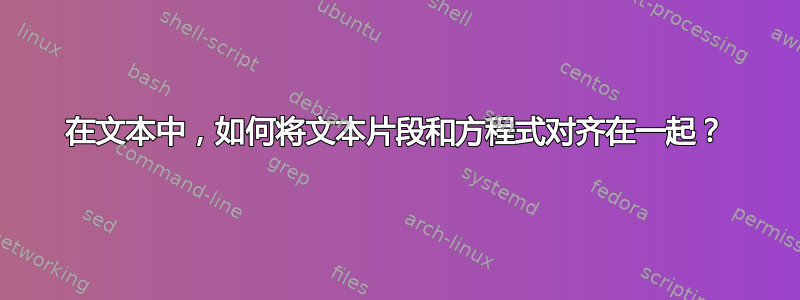
我正在准备一份 LaTeX 文档。我遇到了一个问题,我想让我的文档看起来像所附图片一样。文本全部对齐到页面左侧,方程式对齐到中心。我尝试了很多次但都失败了。有什么帮助吗?
答案1
这个问题问的是什么不太清楚。我只需输入包含equation三个方程式的环境的文本即可。
如果您确实想对齐方程,您可以使用\intertext和align,但结果并不理想。
\documentclass{article}
\usepackage{amsmath}
\usepackage{newtxtext,newtxmath} % image uses Times
\numberwithin{equation}{section}
\newcommand{\der}[2]{\frac{d#1}{d#2}}
\begin{document}
\section{No alignment}
\setcounter{equation}{57} % to emulate the picture
For the PMSM with multiple pairs of poles, the electrical speed relates
to the mechanical speed by
\begin{equation}\label{elec-mech}
\omega_e = Z_p \omega_m
\end{equation}
where $Z_p$ denotes the pair of poles of the PMSM. The rotation of motor
could be described by the following dynamic equation:
\begin{equation}\label{dynamic-m}
J_m\der{\omega_m}{t} = T_e - B_v\omega_m - T_L
\end{equation}
with $J_m$ denoting the total inertia, $B_v$ viscous friction and $T_L$
load torque. Replacing the mechanical speed $\omega_m$ with electrical
speed $\omega_e$ in~\eqref{dynamic-m} gives
\begin{equation}\label{dynamic-e}
\der{\omega_e}{t} = \frac{Z_p}{J_m}\biggl(T_e - \frac{B_v}{Z_p}\omega_e - T_L\biggr)
\end{equation}
\section{With alignment}
\setcounter{equation}{57} % to emulate the picture
For the PMSM with multiple pairs of poles, the electrical speed relates
to the mechanical speed by
\begin{align}
\omega_e &= Z_p \omega_m \label{elec-mech-A} \\
\intertext{where $Z_p$ denotes the pair of poles of the PMSM. The rotation of motor
could be described by the following dynamic equation:}
J_m\der{\omega_m}{t} &= T_e - B_v\omega_m - T_L \label{dynamic-m-A} \\
\intertext{with $J_m$ denoting the total inertia, $B_v$ viscous friction and $T_L$
load torque. Replacing the mechanical speed $\omega_m$ with electrical
speed $\omega_e$ in~\eqref{dynamic-m-A} gives}
\der{\omega_e}{t} &= \frac{Z_p}{J_m}\biggl(T_e - \frac{B_v}{Z_p}\omega_e - T_L\biggr)
\label{dynamic-e-A}
\end{align}
\end{document}
