

背面代码:
\begin{figure}
\begin{center}
\begin{tikzpicture}[font=\sffamily,boxed/.style={minimum width=1.7cm,minimum height=1cm,draw,thick,text width=2.8cm,text centered},node distance=.3cm]
\begin{scope}[local bounding box=upper]
\begin{scope}[start chain=1 going below,every join/.style={-latex,thick},frm/.style={boxed,on chain=1,join}]
\node[on chain=1](n0) {\scriptsize Training Sequence};
\node[frm](n1) {\scriptsize cjhj cnnsfjhj chhsd ccnsdjdk cc width and length};
\node[frm](n2) {\scriptsize jxhhdhj ncjdhasd njshkdjad hdhid Sequences};
\node[frm](n3) {\scriptsize bznxd bjksfhkdg sfjkhjaksd hsjkfhr minimum cardinality $m$};
\node[frm](n4) {\scriptsize kjdhakjdhsf fjkhad (RKP) set Construction};
\end{scope}
\node[boxed,right=0.7cm of n1] (n7) {\scriptsize bzdbakjd xbkjdhkdjaxk bkjdhdkjahd xhskjfhdk bckdg};
\node[boxed,right=.7cm of n2] (n8) {\scriptsize nxzmnankj ncjkhjdhhcjhfsj zxjckahdakj };
\node at (n0-|n8) (n9) {\scriptsize Test Sequence};
\node[boxed,right=0.7cm of n3] (n10) {\scriptsize cjhhiuh kdhas input-output frames};
\node[boxed,right=0.7cm of n4] (n11) {\scriptsize hcjshxhz nzx,mcnls ckjhflsf chcfhrrl RKP};
% \node[below=2cm of n10, trapezium,trapezium left angle=60,trapezium right angle=120,
% minimum width=1cm,minimum height=.5cm,draw,thick] (n14) {\scriptsize Final class};
\end{scope}
\begin{scope}[every edge/.style={draw,-latex,thick}]
\path
% (n1) edge (n8)
% \draw [arrow] (nm) |- (pro1);
(n9) edge (n7)
(n7) edge (n8)
(n10) edge (n8)
(n4) edge (n11)
(n11) edge (n10);
% (n11.north-|n10) edge (n10);
% ([xshift=-2mm]n10.south east) coordinate(aux) edge (n14.north-|aux);
\end{scope}
\end{tikzpicture}
\end{center}
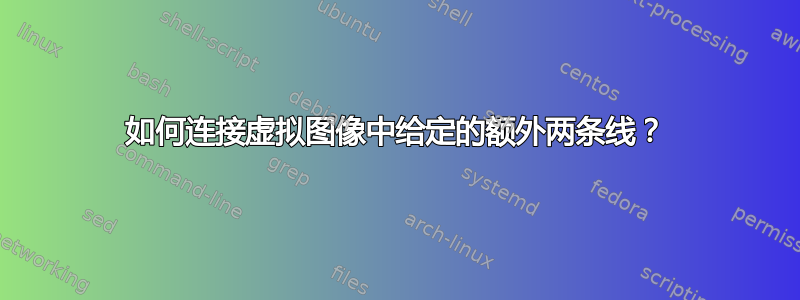
\caption{Block diagram of the proposed gait recognition approach}
\label{fig:block11}
\end{figure}
上述代码的输出:
期望输出带有两行额外内容:
答案1
像这样?
\documentclass{article}
\usepackage{tikz}
\usetikzlibrary{calc,chains,positioning}
\begin{document}
\begin{figure}
\begin{center}
\begin{tikzpicture}[font=\sffamily,boxed/.style={minimum
width=1.7cm,minimum height=1cm,draw,thick,text width=2.8cm,text
centered,font=\scriptsize },node distance=.3cm]
\begin{scope}[local bounding box=upper]
\begin{scope}[start chain=1 going below,every join/.style={-latex,thick},frm/.style={boxed,on chain=1,join}]
\node[on chain=1](n0) {Training Sequence};
\node[frm](n1) {cjhj cnnsfjhj chhsd ccnsdjdk cc width and length};
\node[frm](n2) {jxhhdhj ncjdhasd njshkdjad hdhid Sequences};
\node[frm](n3) {bznxd bjksfhkdg sfjkhjaksd hsjkfhr minimum cardinality $m$};
\node[frm](n4) {kjdhakjdhsf fjkhad (RKP) set Construction};
\end{scope}
\node[boxed,right=0.7cm of n1] (n7) {bzdbakjd xbkjdhkdjaxk bkjdhdkjahd xhskjfhdk bckdg};
\node[boxed,right=.7cm of n2] (n8) {nxzmnankj ncjkhjdhhcjhfsj zxjckahdakj };
\node at (n0-|n8) (n9) {Test Sequence};
\node[boxed,right=0.7cm of n3] (n10) {cjhhiuh kdhas input-output frames};
\node[boxed,right=0.7cm of n4] (n11) {hcjshxhz nzx,mcnls ckjhflsf chcfhrrl RKP};
% \node[below=2cm of n10, trapezium,trapezium left angle=60,trapezium right angle=120,
% minimum width=1cm,minimum height=.5cm,draw,thick] (n14) {\scriptsize Final class};
\end{scope}
\begin{scope}[every edge/.style={draw,-latex,thick}]
\path
(n9) edge (n7)
(n7) edge (n8)
(n10) edge (n8)
(n4) edge (n11)
(n11) edge (n10);
\draw[draw,-latex,thick] (n1.east) -|
($(n1.east)!0.6!(n8.west)$) |- (n8.west);
\draw[draw,-latex,thick] ([yshift=-1ex]n1.east) -|
($(n1.east)!0.4!(n11.west)$) |- ([yshift=1ex]n11.west);
\end{scope}
\end{tikzpicture}
\end{center}
\caption{Block diagram of the proposed gait recognition approach}
\label{fig:block11}
\end{figure}
\end{document}
