

我希望有人能帮助我将这个火柴人代码转换成 Tikz 图片。
\documentclass[11pt]{scrartcl}
\usepackage{tikz}
\usetikzlibrary{shapes.callouts}
%--------------------
\usepackage{amssymb} %maths
\usepackage{amsmath} %maths
\usepackage[utf8]{inputenc} %useful to type directly diacritic characters
\usepackage[siunitx,american, RPvoltages]{circuitikz}
\usetikzlibrary{positioning}
\usepackage{pgfplots}
\usetikzlibrary{arrows,shapes,graphs}
\usepackage{physics}
\usepackage{ifthen}
\usepackage{cancel}
\usepackage[portuges]{babel}
%%
\usepackage[electronic]{ifsym}
\usepackage{xstring}
\usepackage{xcolor}
\usepackage{marvosym} %Smiley
\usepackage{tikzsymbols}%\Cooley
\usepackage{ifthen}
\usepackage{caption}
\pgfplotsset{compat=newest}
%%%%%%%%%%%5
\newcommand{\stickman}[9] % all parameters should be between -1 and 1.
% \stickman{Char}{rightArmpit}{rightElbow}{rightLeg}{rightKnee} {leftArmpit}{lefttElbow}{leftLeg}{lefttKnee}
{
\def\diaHead{0.3}
\def\rap{#2} \def\relb{#3} \def\lap{#6} \def\lelb{#7}
\def\rleg{#4} \def\rknee{#5} \def\lleg{#8} \def\lknee{#9}
\def\phead{(180-90*\rap+90*\lap)/2-90}
\draw[-{Ellipse[line cap=round,length=1.25mm]},thick] (0,0) to[short] ++(-90+180*\lap:2*\diaHead) to ++(180*\lelb+180*\lap-90:2*\diaHead);
\draw[-{Ellipse[line cap=round,length=1.25mm]},thick] (0,0) to[short] ++(270-180*\rap:2*\diaHead) to ++(270-180*\relb-180*\rap:2*\diaHead);
\draw[line width=1.25pt, line cap=mitter] (0,0) to ++(0,-3*\diaHead) node[inner sep=0pt](v){};
\draw[-Bar,thick] (v) to[short] ++(-85+170*\lleg:2*\diaHead) to[short] ++(-85+170*\lknee+170*\lleg:2*\diaHead);
\draw[-Bar,thick] (v) to[short] ++(-95-170*\rleg:2*\diaHead) to[short] ++(-95-170*\rknee-170*\rleg:2*\diaHead);
\node[rotate=\phead, scale=1] at (0,0){\rotatebox[origin=c]{0}{\raisebox{1.0\height}{#1}} } ;
}
\begin{document}
\begin{tikzpicture}[]
\draw[step=2mm] [help lines, black!10] (0,-5) grid (10,5);
\draw[step=10mm] [help lines, blue!30] (0,-5) grid (10,5);
\begin{scope}[xshift=4cm,yshift=4cm,xscale=1]
\stickman{\Smiley{}}{0.1}{0.5}{-0.2}{0.1} {0.1}{0.5}{0}{0}
\end{scope}
\begin{scope}[xshift=2cm,yshift=4cm,scale=0.3]
\stickman{\Smiley{}}{0.5}{0.15}{0}{0} {0.45}{0.75}{0}{0}
\end{scope}
\begin{scope}[xshift=4cm,yshift=0.5cm,xscale=1, color=gray]
\stickman{\Smiley{}}{0.1}{0}{0}{0} {0.1}{0.5}{0}{0}
\end{scope}
\begin{scope}[xshift=5cm,yshift=0.4cm,xscale=1, color=gray]
\stickman{\Smiley{}}{0.25}{-0.4}{0}{0.25} {0.1}{0.5}{0.25}{-0.5}
\end{scope}
\begin{scope}[xshift=6cm,yshift=0.1cm,xscale=1]
\stickman{\Tongey{}}{0.25}{-0.4}{0}{0.5} {0.4}{0.15}{0.5}{-0.5}
\end{scope}
\draw[ thick] (7.5,-2) node[ground](){} to[short]++(0,1) to[nopb] ++(0,2) to[cute inductor]++(0,2) node[vcc](){$+V_{CC}$};
\end{tikzpicture}
\end{document}
答案1
这会将您的宏变成图片。除了将文档的前言压缩为一组更精简的软件包外,主要的挑战是猜测宏名称代表什么,我很确定我没有全部猜对,但没有太多的解释。不过,我确实将每个宏都映射到一个键上。您现在可以说
\path (5,0) pic{stickman={right arm=0.1,left knee=0.2,head=\Tongey}};
其中未指定的键采用一些默认/初始值,您可以通过添加更多键来升级您的图片,而不会失去向后兼容性。
\documentclass[11pt]{scrartcl}
\usepackage[siunitx,american, RPvoltages]{circuitikz}
\usetikzlibrary{shapes.callouts}
%--------------------
\usepackage{amssymb} %maths
\usepackage{amsmath} %maths
\usepackage{marvosym} %Smiley
\usepackage{tikzsymbols}%\Cooley
\tikzset{pics/stickman/.style={code={
\tikzset{stickman/.cd,#1}
\def\pv##1{\pgfkeysvalueof{/tikz/stickman/##1}}%
%
\def\phead{(180-90*\pv{right arm}+90*\pv{left arm})/2-90}
%
\draw[-{Ellipse[line cap=round,length=1.25mm]},thick] (0,0) to[short] ++(-90+180*\pv{left arm}:2*\pv{head diameter}) to ++(180*\pv{left ellbow}+180*\pv{left arm}-90:2*\pv{head diameter});
\draw[-{Ellipse[line cap=round,length=1.25mm]},thick] (0,0) to[short] ++(270-180*\pv{right arm}:2*\pv{head diameter}) to ++(270-180*\pv{right ellbow}-180*\pv{right arm}:2*\pv{head diameter});
%
\draw[line width=1.25pt, line cap=mitter] (0,0) to ++(0,-3*\pv{head diameter}) node[inner sep=0pt](v){};
\draw[-Bar,thick] (v) to[short] ++(-85+170*\pv{left leg}:2*\pv{head diameter}) to[short] ++(-85+170*\pv{left knee}+170*\pv{left leg}:2*\pv{head diameter});
\draw[-Bar,thick] (v) to[short] ++(-95-170*\pv{right leg}:2*\pv{head diameter}) to[short] ++(-95-170*\pv{right knee}-170*\pv{right leg}:2*\pv{head diameter});
%
\node[rotate=\phead, scale=1] at (0,\pv{head diameter}/2) {\pv{head}} ;
}},stickman/.cd,head diameter/.initial=0.3,head/.initial=\Smiley,
right arm/.initial=0.25,left arm/.initial=0.25,
right ellbow/.initial=0.25,left ellbow/.initial=0.25,
right leg/.initial=0,left leg/.initial=0,
right knee/.initial=0,left knee/.initial=0}
\begin{document}
\begin{tikzpicture}[]
\draw[step=2mm] [help lines, black!10] (0,-5) grid (10,5);
\draw[step=10mm] [help lines, blue!30] (0,-5) grid (10,5);
\path (2,0) pic{stickman}
(5,0) pic{stickman={right arm=0.1,left knee=0.2,head=\Tongey}};
\draw[ thick] (7.5,-2) node[ground](){} to[short]++(0,1) to[nopb] ++(0,2) to[cute inductor]++(0,2) node[vcc](){$+V_{CC}$};
\end{tikzpicture}
\end{document}

Rmano 的一个版本。
\documentclass[11pt]{scrartcl}
\usepackage[siunitx,american, RPvoltages]{circuitikz}
\usetikzlibrary{shapes.callouts}
%--------------------
\usepackage{amssymb} %maths
\usepackage{amsmath} %maths
\usepackage{marvosym} %Smiley
\usepackage{tikzsymbols}%\Cooley
\makeatletter
\tikzset{use fpu reciprocal/.code={%
\def\pgfmathreciprocal@##1{%
\begingroup
\pgfkeys{/pgf/fpu=true,/pgf/fpu/output format=fixed}%
\pgfmathparse{1/##1}%
\pgfmath@smuggleone\pgfmathresult
\endgroup
}}}%
\makeatother
\usetikzlibrary{decorations.pathmorphing,fpu}
\tikzset{pics/stickman/.style={code={
\tikzset{stickman/.cd,#1}
\def\pv##1{\pgfkeysvalueof{/tikz/stickman/##1}}%
%
\def\phead{(180-90*\pv{right arm}+90*\pv{left arm})/2-90}
%
\draw[/tikz/stickman/body,-{Ellipse[line cap=round,length=1.25mm]},thick] (0,0) to[short] ++(-90+180*\pv{left arm}:2*\pv{head diameter}) to ++(180*\pv{left ellbow}+180*\pv{left arm}-90:2*\pv{head diameter});
\draw[/tikz/stickman/body,-{Ellipse[line cap=round,length=1.25mm]},thick] (0,0) to[short] ++(270-180*\pv{right arm}:2*\pv{head diameter}) to ++(270-180*\pv{right ellbow}-180*\pv{right arm}:2*\pv{head diameter});
%
\draw[/tikz/stickman/body,line width=1.25pt, line cap=mitter] (0,0) to ++(0,-3*\pv{head diameter}) node[inner sep=0pt](v){};
\draw[/tikz/stickman/body,-Bar,thick] (v) to[short] ++(-85+170*\pv{left leg}:2*\pv{head diameter}) to[short] ++(-85+170*\pv{left knee}+170*\pv{left leg}:2*\pv{head diameter});
\draw[/tikz/stickman/body,-Bar,thick] (v) to[short] ++(-95-170*\pv{right leg}:2*\pv{head diameter}) to[short] ++(-95-170*\pv{right knee}-170*\pv{right leg}:2*\pv{head diameter});
%
\node[rotate=\phead, scale=1,decorate=false] at (0,\pv{head diameter}/2) {\pv{head}} ;
}},stickman/.cd,head diameter/.initial=0.3,head/.initial=\Smiley,
right arm/.initial=0.25,left arm/.initial=0.25,
right ellbow/.initial=0.25,left ellbow/.initial=0.25,
right leg/.initial=0,left leg/.initial=0,
right knee/.initial=0,left knee/.initial=0,
body/.style={}}
\begin{document}
\begin{tikzpicture}[]
\path[use fpu reciprocal]
(5,0) pic[]{stickman={right arm=0.1,left knee=0.2,head=\Tongey,
body/.style={decoration={random steps,segment
length=1mm,amplitude=1.2pt},decorate}}};
\end{tikzpicture}
\end{document}

(这实际上说明了一点:我们可以随时升级这些图片,而旧的语法将继续起作用并产生原始结果。)
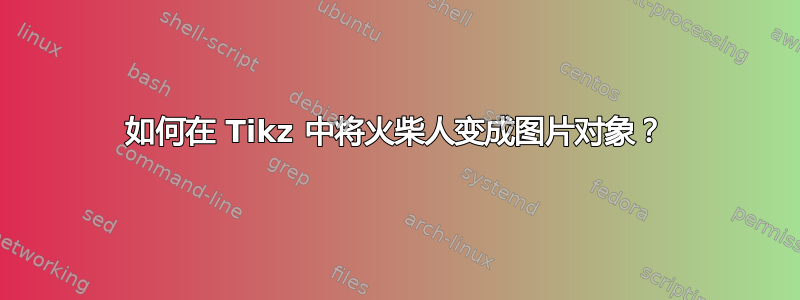
答案2
修正了“ellbow”的拼写,添加了袜子+鞋子(以防需要隔离),并测试了电击棍子人,只是为了好玩!
\documentclass[11pt]{scrartcl}
\usepackage[siunitx,american, RPvoltages]{circuitikz}
\usetikzlibrary{shapes.callouts}
%--------------------
\usepackage{amssymb} %maths
\usepackage{amsmath} %maths
\usepackage{physics}
\usepackage{marvosym} %Smiley
\usepackage{tikzsymbols}%\Cooley
\makeatletter
\tikzset{use fpu reciprocal/.code={%
\def\pgfmathreciprocal@##1{%
\begingroup
\pgfkeys{/pgf/fpu=true,/pgf/fpu/output format=fixed}%
\pgfmathparse{1/##1}%
\pgfmath@smuggleone\pgfmathresult
\endgroup
}}}%
\makeatother
\usetikzlibrary{decorations.pathmorphing,fpu}
\tikzset{pics/stickman/.style={code={
\tikzset{stickman/.cd,#1}
\def\pv##1{\pgfkeysvalueof{/tikz/stickman/##1}}%
%
\def\phead{(180-90*\pv{right arm}+90*\pv{left arm})/2-90}
%
\draw[/tikz/stickman/body,-{Ellipse[line cap=round,length=1.25mm]},thick] (0,0) to[short] ++(-90+180*\pv{left arm}:2*\pv{head diameter}) to ++(180*\pv{left elbow}+180*\pv{left arm}-90:2*\pv{head diameter});
\draw[/tikz/stickman/body,-{Ellipse[line cap=round,length=1.25mm]},thick] (0,0) to[short] ++(270-180*\pv{right arm}:2*\pv{head diameter}) to ++(270-180*\pv{right elbow}-180*\pv{right arm}:2*\pv{head diameter});
%
\draw[/tikz/stickman/body,line width=1.25pt, line cap=mitter] (0,0) to ++(0,-3*\pv{head diameter}) node[inner sep=0pt](v){};
\draw[/tikz/stickman/body,-\pv{shoes},thick] (v) to[short] ++(-85+170*\pv{left leg}:2*\pv{head diameter}) to[short] ++(-85+170*\pv{left knee}+170*\pv{left leg}:2*\pv{head diameter});
\draw[/tikz/stickman/body,-\pv{shoes},thick] (v) to[short] ++(-95-170*\pv{right leg}:2*\pv{head diameter}) to[short] ++(-95-170*\pv{right knee}-170*\pv{right leg}:2*\pv{head diameter});
%
\node[rotate=\phead, scale=1,decorate=false] at (0,\pv{head diameter}/2) {\pv{head}} ;
}},stickman/.cd,
head diameter/.initial=0.3,
head/.initial=\Smiley,
right arm/.initial=0.25,
left arm/.initial=0.25,
right elbow/.initial=0.25,
left elbow/.initial=0.25,
right leg/.initial=0,
left leg/.initial=0,
right knee/.initial=0,
left knee/.initial=0,
shoes/.initial={|},
body/.style={}}
\begin{document}
\begin{circuitikz}[ note/.style={rectangle callout, fill=#1}]
\draw (0,-2.1) --++(8,0); % a ground floor
% safe to touch
\begin{scope}
\draw[] (2,-1.6) node[cground](){} to[ncpb] ++(0,2) to[cute inductor, v>=$V_s$, i<=$i$]++(0,2) node[vcc](){$V_{s}$};
\path[]
(0.7,0) pic[]{stickman={right arm=0.1,right elbow=-0.4,right knee=0.5,
left arm=0.25,left elbow=0.15,left leg=0.4,left knee=-0.5,
shoes={Latex[reversed,color=lightgray]Bar[color=orange]Bar[color=black]},
head=\Smiley}}
(3,0) pic[]{stickman={right arm=0.55,right elbow=0.15,left knee=0.2,head=\Tongey[][][red]}}
;
\node [note=red!20, callout relative pointer={(0.4,-0.5)},rounded corners, text width=1.5cm] at (0,1.25) {Shall I open it?};
\node [note=blue!20, callout relative pointer={(-0.4,-0.5)},rounded corners] at (3.5,1) {Is it safe?};
\end{scope}
% It's not always safe to touch
\begin{scope}[xshift=4cm]
\draw[] (2,-1.6) node[cground](){} to[nopb] ++(0,2) to[cute inductor,v={\,}, a= \color{red}{$\Delta V{=}L\dv{i}{t}$}, i<=$i$]++(0,2) node[vcc](){$V_{s}$};
% safe to touch
\path[]
(0.8,0) pic[]{stickman={right arm=0.1,right elbow=-0.4,right knee=0.5,
left arm=0.15,left elbow=0.3,left leg=0.5,left knee=-0.5,
shoes={Latex[reversed,color=lightgray]Bar[color=orange]Bar[color=black]},
head=\Sadey}}
;
\path[use fpu reciprocal, orange]
(3,0) pic[]{stickman={right arm=0.55,right elbow=0.15,right knee=-0.2,left elbow=0.75,left leg=0.15,left knee=0.5,head=\NiceReapey,
body/.style={decoration={random steps,segment
length=1mm,amplitude=1.2pt},decorate}}};
\node [note=red!20, callout relative pointer={(-0.3,-0.5)},rounded corners] at (1.25,1) {No!};
\end{scope}
\end{circuitikz}
\end{document}
