

我是 Tikz 新手,我设法组合了几个 Tikz 代码示例 [x] 来表示 3 自由度系统。但是,我想“平移”/移动摆锤米到第二个质量M2但它不起作用。pdf 内容的中心似乎被定义为M.中心以及角度的“定义”。我没能改变这一点,因为我试图移动摆锤,角度不会转移到下一个质量 M2。
请参阅下面的代码:
\documentclass[tikz]{standalone}
\usetikzlibrary{calc,patterns,decorations.pathmorphing,decorations.markings}
\usepackage{physics}
\usepackage{siunitx}
\sisetup{detect-all} % to allow \pi in \SI
\usepackage{tikz,pgfplots}
\usepackage[outline]{contour} % glow around text
\usetikzlibrary{calc}
\usetikzlibrary{angles,quotes} % for pic
\usetikzlibrary{arrows.meta}
\tikzset{>=latex} % for LaTeX arrow head
\contourlength{1.2pt}
\colorlet{xcol}{blue!70!black}
\colorlet{vcol}{green!60!black}
\colorlet{myred}{red!70!black}
\colorlet{myblue}{blue!70!black}
\colorlet{mygreen}{green!70!black}
\colorlet{mydarkred}{myred!70!black}
\colorlet{mydarkblue}{myblue!60!black}
\colorlet{mydarkgreen}{mygreen!60!black}
\colorlet{acol}{red!50!blue!80!black!80}
\tikzstyle{CM}=[red!40!black,fill=red!80!black!80]
\tikzstyle{xline}=[xcol,thick,smooth]
\tikzstyle{mass}=[line width=0.6,red!30!black,fill=red!40!black!10,rounded corners=1,top color=red!40!black!20,bottom color=red!40!black!10,shading angle=20]
\tikzstyle{faded mass}=[dashed,linewidth=0.1,red!30!black!40,fill=red!40!black!10,rounded corners=1,top color=red!40!black!10,bottom color=red!40!black!10,shading angle=20]
\tikzstyle{rope}=[black!70!black,thick,line cap=round]
\def\rope#1{ \draw[black,line width=0.8] #1; \draw[rope,line width=1.1] #1; }
\tikzstyle{force}=[->,myred,very thick,line cap=round]
\tikzstyle{velocity}=[->,vcol,very thick,line cap=round]
\tikzstyle{Fproj}=[force,myred!40]
\tikzstyle{myarr}=[-{Latex[length=3,width=2]},ultra thick]
\def\tick#1#2{\draw[thick] (#1)++(#2:0.12) --++ (#2-180:0.24)}
\DeclareMathOperator{\sn}{sn}
\DeclareMathOperator{\cn}{cn}
\DeclareMathOperator{\dn}{dn}
\def\N{80} % number of samples in plots
\tikzstyle{axis}=[->,thick] %line width=0.6
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
\tikzstyle{spring}=[thick,decorate,decoration={zigzag,pre length=0.3cm,post length=0.3cm,segment length=6,amplitude=1.75mm}] %amplitude=1.75mm
\tikzstyle{damper}=[thick,decoration={markings,
mark connection node=dmp,
mark=at position 0.5 with
{
\node (dmp) [thick,inner sep=0pt,transform shape,rotate=-90,minimum width=15pt,minimum height=3pt,draw=none] {};
\draw [thick] ($(dmp.north east)+(2pt,0)$) -- (dmp.south east) -- (dmp.south west) -- ($(dmp.north west)+(2pt,0)$);
\draw [thick] ($(dmp.north)+(0,-5pt)$) -- ($(dmp.north)+(0,5pt)$);
}
}, decorate]
\tikzstyle{ground}=[fill,pattern=north east lines,draw=none,minimum width=0.75cm,minimum height=0.3cm,inner sep=0pt,outer sep=0pt]
\definecolor{monOrange}{RGB}{255,157,0}
\definecolor{monBleu}{rgb}{0.2,0.4,0.6}
\definecolor{monCyan}{RGB}{74,181,247}
\definecolor{monGris}{RGB}{100,100,100}
\definecolor{monRed}{RGB}{255, 36, 0}
\tikzset{
seisme/.style={color=cyan,ultra thick,->},
vent/.style={color=monRed,ultra thick,->},
}
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
\begin{document}
%%%%%%%%%%%%%%% SHEMA MODAL 3DDL %%%%%%%%%%%%%%%
\begin{tikzpicture}[scale=1.1, every node/.style={scale=1.3}]
% Rectangle masse m1 + petites roues
\node [draw, outer sep=0pt, thick] (M) [minimum width=2cm, minimum height=1.5cm] {$M$};
\draw [thick, fill=white] (M.south west) ++(0.2cm,-0.125cm) circle (0.125cm) (M.south east) ++(-0.2cm,-0.125cm) circle (0.125cm);
% Rectangle masse m2 + petites roues
\node [draw, outer sep=0pt, thick] (M2) [minimum width=2cm, minimum height=1.5cm, xshift = 4cm] {$M_2$}; % rectangle entourant la masse m2
\draw [thick, fill=white] (M2.south west) ++(0.2cm,-0.125cm) circle (0.125cm) (M2.south east) ++(-0.2cm,-0.125cm) circle (0.125cm); % 2 petits cercles sous la masse m2
% Ground bas
\node (ground) [ground,anchor=north,yshift=-0.2cm,minimum width=10cm,xshift=2.03cm] at (M.south) {}; % ground bas hachurage
\draw (ground.north west) -- (ground.north east) -- (ground.south east) -- (ground.south west); %traits horizontaux entourant le ground bas
\node (fill) [ground,xshift=-0.15cm,minimum height = 0.3cm, minimum width = 0.3cm] at (ground.west) {}; %petit ajout de ground bas tout à gauche
\draw (fill.north west) -- (fill.south west) -- (fill.south east);
% Ground vertical
\node (wall) [ground, rotate=-90, minimum width=3cm,anchor=south east] at (fill.north west) {}; % ground vertical hachurage
\draw (wall.north east) -- (wall.north west) -- (wall.south west) -- (wall.south east); %traits horizontaux entourant le ground vertical
% % Ressort k
\draw [spring] (M.east) -- (M2.west) node (k) [midway,yshift=0.4cm] {$k$};
% Ressort k
\draw [spring] (wall.15) node[left= 0.3cm]{$O$} -- ($(M.north west)!(wall.15)!(M.south west)$) node [midway,yshift=0.4cm] {$k$};
% Force d'excitation sur la masse m2
%\draw [-latex,ultra thick] (M2.east) -- +(1cm,0cm) node [right] (u) {$F(t) = F_0 \sin{\omega t}$};
%Déplacement de la masse m1 noté y1
\draw [-latex,ultra thick] (M.center) ++(0cm, 1.4cm) -- +(1cm,0cm) node [above] (y1) {$x(t)$}; % flèche déplacement x(t)
\draw [dashed] (M.center) -- +(0cm,1.4cm); % trait pointillés y1
% Déplacement de la masse m2 noté y2
\draw [-latex,ultra thick] (M2.center) ++(0cm, 1.4cm) -- +(1cm,0cm) node [above] (y2) {$x_2(t)$}; % flèche déplacement x(t)
\draw [dashed] (M2.center) -- +(0cm,1.4cm); % trait pointillés y2
% Axes (x,y) et centre 0 du repère cartésien
%\draw[axis] (0,0)--(5.7,0) node[right] {$\overrightarrow{x}$}
\draw[dashed,->](M2)--(7.7,0) node[right]{$\overrightarrow{x}$};
\draw[dashed,->](wall.15)--(-3.5,5) node[left]{$\overrightarrow{y}$};
% PENDULUM
\def\L{5} % string length
\def\ang{28} % angle string
\def\R{0.4} % ball radius
\def\F{1.0} % force magnitude
\coordinate (M) at (\ang-90:\L);
\coordinate (M') at (0,-\L);
\coordinate (O) at (0,0);
\coordinate (B) at (0,-\L-2.2*\R);
\coordinate (FT) at ($(M)+(90+\ang:{\F*cos(\ang)+\R})$);
\coordinate (FG) at ($(M)+(-90:{\F+\R})$);
\coordinate (FGx) at ($(M)+(-90+\ang:{0.55*\F+\R})$);
\coordinate (MA) at ($(M)+(180+\ang:{\F*sin(\ang)+\R})$);
%\draw[faded mass] (M') circle(\R);
\draw[dashed] (O) -- (B);
\draw[dashed] (-90+\ang+10:\L) arc(-90+\ang+10:-110:\L) (B);
\rope{(O) -- (M)} \path (O) -- (M) node[midway,above right=-1] {$L$};
\fill[black] (O) circle(0.04);
\draw[mass] (M) circle(\R) node {$m$};
\draw pic[myarr,"$\theta$",xcol,draw=xcol,angle radius=43,angle eccentricity=1.30] {angle=B--O--M};
\end{tikzpicture}
\end{document}
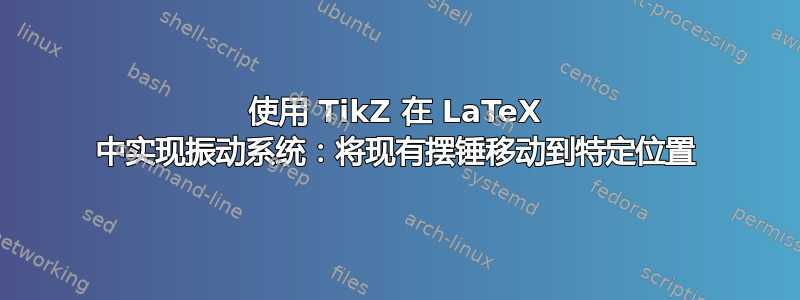
以下是我得到的结果:

欢迎提出任何建议!
答案1
为了好玩,动画模拟结果。
运动方程是通过系统的动能和势能推导出来的,拉格朗日形式并\pstODEsolve使用包解决pst-ode。


%\documentclass[margin=3pt,10pt,export]{standalone} % for GIF
%\documentclass[margin=3pt,10pt,dvisvgm]{standalone} % for SVG, run twice: dvilualatex example ; dvisvgm --font-format=woff --zoom=-1 --page=1 example.dvi
\documentclass[margin=3pt,10pt]{standalone} % for PDF, run lualatex twice
\usepackage{pst-ode}
\usepackage[loop,controls]{animate}
\usepackage{tikz}
\usetikzlibrary{calc,arrows.meta,decorations.pathmorphing,patterns.meta}
\usepackage{listofitems} % read space separated items
\usepackage[T1]{fontenc}
\usepackage{xsavebox}
% adjustable parameters & definitions
\pstVerb{
tx@Dict begin % all definitions within PSTricks dict
/tEnd 60 def % time span to be simulated [s]
% /tEnd 13.56 def % this time span gives a nearly cyclic impression, suitable for GIF
/m1 1 def % mass_1 [kg]
/m2 1 def % mass_2 [kg]
/m3 0.1 def % mass_3 (bob) [kg]
/L 2 def % pendulum length [m]
/k1 80 def % spring constant [kg/s^2]
/k2 40 def % spring constant [kg/s^2]
/g 9.81 def % acceleration [m/s^2]
/x2Zero 0.9 def % initial displacement of mass_2 [m]
/thetaZero 0 def % initial displacement of pendulum from vertical [°]
%
% (integer) number of time steps (for 25 frames per s) + 1
/N (cvi(tEnd*25+1)) AlgParser cvx exec def
%
% initial displacement of mass_1
/x1Zero (k2/(k1+k2)*x2Zero) AlgParser cvx exec def
%
% some constants
/k12M1 ((k1+k2)/m1) AlgParser cvx exec def
/k2M1 (k2/m1) AlgParser cvx exec def
%
% displacements of mass_1, mass_2, pendulum
/x1 (x[0]) AlgParser cvx def
/x2 (x[1]) AlgParser cvx def
/theta (x[2]) AlgParser cvx def
%
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% 1st order ODE system (equations of motion)
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% velocities
/v1 (x[3]) AlgParser cvx def
/v2 (x[4]) AlgParser cvx def
/omega (x[5]) AlgParser cvx def
% accelerations
/a1 (k2M1*x2 - k12M1*x1) AlgParser cvx def
/a2 ((m3*sin(theta)*(g*cos(theta)+L*omega^2)-k2*(x2-x1))/(m2+m3*sin(theta)^2)) AlgParser cvx def
/alpha (-(a2*cos(theta) + g*sin(theta))/L) AlgParser cvx def
end
}
% solve equations of motion
\pstODEsolve[algebraicAll,saveData]{timeX1X2Theta}{ % PS variable and file (base-)name that take result list
t | x1 | x2 | RadtoDeg(theta-TwoPi*cvi(theta/TwoPi)) % table format of data to be saved in timeX1X2Theta(.dat)
}{0}{tEnd}{N}{ % t_0, t_end, number of time steps + 1
x1Zero | x2Zero | DegtoRad(thetaZero) | 0 | 0 | 0 % initial conditions (displacements, velocities)
}{
v1 | v2 | omega | a1 | a2 | alpha % ODE system's RHS
}
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
% \fileopenr{<file stream>}{<file name>}, opens file for reading
\newcommand\fileopenr[2]{%
\newread#1%
\immediate\openin#1=#2%
}
% \readtolist[<sep char>]{<file stream>}{\list}
% reads a line from file stream and splits at <sep char> into \list[1], \list[2], ...
\newcommand\readtolist[3][,]{{%
\setsepchar{#1}%
\immediate\read#2 to \inputline%
\ifeof#2
\immediate\closein#2%
\ifdefined\multiframebreak\multiframebreak\fi%
\else%
\greadlist*#3\inputline%
\fi%
}}
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
\tikzset{spring/.style={decorate, decoration={zigzag,pre length=0.2cm,post length=0.2cm,segment length=\dimexpr(#1-0.4cm-1pt)/14\relax, amplitude=0.1cm}}}
\begin{document}
\IfFileExists{timeX1X2Theta.dat}{}{dummy\end{document}}%
% cart
\begin{xlrbox}{cart}
\begin{tikzpicture}[line width=0.2mm]
\useasboundingbox (-1,0) rectangle (1,1.6);
\draw (-0.99,0.1) rectangle (0.99,1.59);
\fill [radius=0.1] (0,0.8) -- ++(0.1,0) arc [radius=0.1,start angle=0,end angle=90] -- ++(0,-0.2) arc [start angle=270, end angle=180];
\draw [thin] (0,0.8) circle [radius=0.1];
\filldraw [fill=white] (-0.8,0.1) circle [radius=0.08] (0.8,0.1) circle [radius=0.08];
\end{tikzpicture}
\end{xlrbox}%
%
\begin{animateinline}{25}
\fileopenr{\data}{timeX1X2Theta.dat}%
\readtolist[ ]{\data}{\table}%
\multiframe{10000}{}{
\begin{tikzpicture}[line width=0.2mm]
\useasboundingbox (-0.3,-1.5) rectangle (10.1,3.1);
% ground & wall
\draw [pattern={Lines[angle=-45,line width=0.2pt,distance={3pt/sqrt(2)}]}] (0,0) -- (10,0) -- (10,-0.25) -- (-0.25,-0.25) -- (-0.25,2) -- (0,2) --cycle;
% cart 1
\path [shift={(\table[2],0)}] (3,0.8) node[inner sep=0, name={cart1}] {\thecart} node [anchor=south] {$m_1$};
% mass_2 (cart2) and mass_3 (bob) centres
\path[shift={(\table[3],0)}] (7,0.8) coordinate (mass2) ++(\fpeval{\table[4]-90.0}:2) coordinate (bob);
% cart 2
\path (mass2) node[inner sep=0] (cart2) {\thecart} node [anchor=south] {$m_2$};
% springs
\coordinate (wall) at (0,0.8);
\draw[line join=round, line cap=rect] let \p1=($(cart1.west)-(wall)$) in [draw,spring={\x1}] (wall) -- (cart1.west) node [midway,above,yshift=1pt] {$k_1$};
\draw[line join=round, line cap=rect] let \p1=($(cart2.west)-(cart1.east)$) in [draw,spring={\x1}] (cart1.east) -- (cart2.west) node [midway,above,yshift=1pt] {$k_2$};
% pendulum
\draw (mass2) -- (bob) node[inner sep=1pt,midway,anchor=west,rotate={\table[4]}] {$L$};
\draw [thin,fill=white] (mass2) circle [radius=0.03];
\draw [thin,fill=white!90!black] (bob) circle [radius=0.21];
\path (bob) node[rotate={\table[4]}] {\scriptsize $m_3$};
% coordinates
\draw[very thin,dashdotted] (3,0.8) -- ++(0,1); \draw[-latex] (3,0.8) ++(0,1) -- ++(0.5,0) node[above] {$x_1$};
\draw[very thin,dashdotted] (7,0.8) -- ++(0,1); \draw[-latex] (7,0.8) ++(0,1) -- ++(0.5,0) node[above] {$x_2$};
\draw[very thin,dashdotted] (mass2) -- ++(0,-0.55);
\draw[-latex] (mass2) ++(0,-0.5) arc [radius=0.5,start angle=270,end angle=300] -- ++(30:0.1) node[inner sep=0pt,above right] {\small $\theta$};
\end{tikzpicture}%
\readtolist[ ]{\data}{\table}
}
\end{animateinline}
\end{document}
答案2
最简单的方法可能就是shift通过 来编写钟摆代码(M2)。

我部分清理、最小化并更新了您的代码,并进行了修复以避免错误。
\documentclass[border=5pt]{standalone}
\usepackage{tikz}
\usetikzlibrary{calc,patterns,angles,quotes,arrows.meta,decorations.pathmorphing}
\tikzset{>=latex} % for LaTeX arrow head
\colorlet{xcol}{blue!70!black}
\tikzset{mass/.style={line width=0.6,red!30!black,fill=red!40!black!10,rounded corners=1,top color=red!40!black!20,bottom color=red!40!black!10,shading angle=20}}
\tikzset{rope/.style={black!70!black,thick,line cap=round}}
\tikzset{force/.style={->,myred,very thick,line cap=round}}
\tikzset{myarr/.style={->,ultra thick}}
\newcommand\rope[1]{ \draw[black,line width=0.8] #1; \draw[rope,line width=1.1] #1; }
\tikzset{spring/.style={thick,decorate,decoration={zigzag,pre length=0.3cm,post length=0.3cm,segment length=6,amplitude=1.75mm}}, %amplitude=1.75mm
damper/.style={thick,decoration={markings,
mark connection node=dmp,
mark=at position 0.5 with
{
\node (dmp) [thick,inner sep=0pt,transform shape,rotate=-90,minimum width=15pt,minimum height=3pt,draw=none] {};
\draw [thick] ($(dmp.north east)+(2pt,0)$) -- (dmp.south east) -- (dmp.south west) -- ($(dmp.north west)+(2pt,0)$);
\draw [thick] ($(dmp.north)+(0,-5pt)$) -- ($(dmp.north)+(0,5pt)$);
}
}, decorate},
ground/.style={fill,pattern=north east lines,draw=none,minimum width=0.75cm,minimum height=0.3cm,inner sep=0pt,outer sep=0pt},
}
\begin{document}
%%%%%%%%%%%%%%% SHEMA MODAL 3DDL %%%%%%%%%%%%%%%
\begin{tikzpicture}[scale=1.1, every node/.style={scale=1.3}]
% Rectangle masse m1 + petites roues
\node [draw, outer sep=0pt, thick] (M) [minimum width=2cm, minimum height=1.5cm] {$M$};
\draw [thick, fill=white] (M.south west) ++(0.2cm,-0.125cm) circle (0.125cm) (M.south east) ++(-0.2cm,-0.125cm) circle (0.125cm);
% Rectangle masse m2 + petites roues
\node [draw, outer sep=0pt, thick] (M2) [minimum width=2cm, minimum height=1.5cm, xshift = 4cm] {$M_2$}; % rectangle entourant la masse m2
\draw [thick, fill=white] (M2.south west) ++(0.2cm,-0.125cm) circle (0.125cm) (M2.south east) ++(-0.2cm,-0.125cm) circle (0.125cm); % 2 petits cercles sous la masse m2
% Ground bas
\node (ground) [ground,anchor=north,yshift=-0.2cm,minimum width=10cm,xshift=2.03cm] at (M.south) {}; % ground bas hachurage
\draw (ground.north west) -- (ground.north east) -- (ground.south east) -- (ground.south west); %traits horizontaux entourant le ground bas
\node (fill) [ground,xshift=-0.15cm,minimum height = 0.3cm, minimum width = 0.3cm] at (ground.west) {}; %petit ajout de ground bas tout à gauche
\draw (fill.north west) -- (fill.south west) -- (fill.south east);
% Ground vertical
\node (wall) [ground, rotate=-90, minimum width=3cm,anchor=south east] at (fill.north west) {}; % ground vertical hachurage
\draw (wall.north east) -- (wall.north west) -- (wall.south west) -- (wall.south east); %traits horizontaux entourant le ground vertical
% % Ressort k
\draw [spring] (M.east) -- (M2.west) node (k) [midway,yshift=0.4cm] {$k$};
% Ressort k
\draw [spring] (wall.15) node[left= 0.3cm]{$O$} -- ($(M.north west)!(wall.15)!(M.south west)$) node [midway,yshift=0.4cm] {$k$};
% Force d'excitation sur la masse m2
%\draw [-latex,ultra thick] (M2.east) -- +(1cm,0cm) node [right] (u) {$F(t) = F_0 \sin{\omega t}$};
%Déplacement de la masse m1 noté y1
\draw [-latex,ultra thick] (M.center) ++(0cm, 1.4cm) -- +(1cm,0cm) node [above] (y1) {$x(t)$}; % flèche déplacement x(t)
\draw [dashed] (M.center) -- +(0cm,1.4cm); % trait pointillés y1
% Déplacement de la masse m2 noté y2
\draw [-latex,ultra thick] (M2.center) ++(0cm, 1.4cm) -- +(1cm,0cm) node [above] (y2) {$x_2(t)$}; % flèche déplacement x(t)
\draw [dashed] (M2.center) -- +(0cm,1.4cm); % trait pointillés y2
% Axes (x,y) et centre 0 du repère cartésien
%\draw[axis] (0,0)--(5.7,0) node[right] {$\overrightarrow{x}$}
\draw[dashed,->](M2)--(7.7,0) node[right]{$\overrightarrow{x}$};
\draw[dashed,->](wall.15)--(-3.5,5) node[left]{$\overrightarrow{y}$};
% PENDULUM
\def\L{5} % string length
\def\ang{28} % angle string
\def\R{0.4} % ball radius
\def\F{1.0} % force magnitude
\begin{scope}[shift=(M2)]
\coordinate (Mx) at (\ang-90:\L);
\coordinate (M') at (0,-\L);
\coordinate (O) at (0,0);
\coordinate (B) at (0,-\L-2.2*\R);
\coordinate (FT) at ($(Mx)+(90+\ang:{\F*cos(\ang)+\R})$);
\coordinate (FG) at ($(Mx)+(-90:{\F+\R})$);
\coordinate (FGx) at ($(Mx)+(-90+\ang:{0.55*\F+\R})$);
\coordinate (MA) at ($(Mx)+(180+\ang:{\F*sin(\ang)+\R})$);
\draw[dashed] (O) -- (B);
\draw[dashed] (-90+\ang+10:\L) arc(-90+\ang+10:-110:\L) (B);
\rope{(O) -- (Mx)} \path (O) -- (Mx) node[midway,above right=-1] {$L$};
\fill[black] (O) circle(0.04);
\draw[mass] (Mx) circle(\R) node {$m$};
\draw pic[myarr,"$\theta$",xcol,draw=xcol,angle radius=43,angle eccentricity=1.30] {angle=B--O--Mx};
\end{scope}
\end{tikzpicture}
\end{document}