

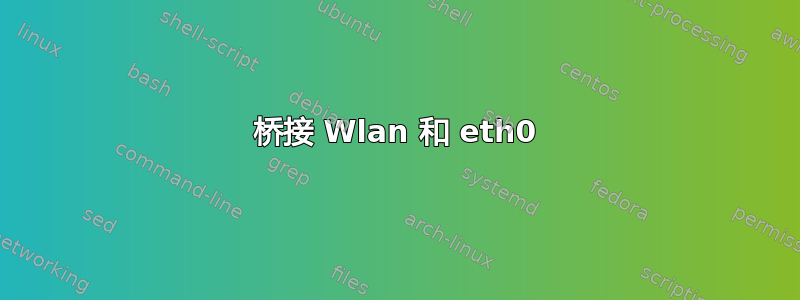
我的问题如下,我正在使用一个相当复杂的网络架构来进行多机器人操作。一个机器人由不同的嵌入式计算机和一个交换机组成,使用子网 192.168.88.X 构成本地网络。其中一台计算机是 Raspberry Pi,运行 Ubuntu 18.4 操作系统。它使用天线连接到无线网络,也使用子网 192.168.88.X。
下图就是具体情况:
{kind=link}
我的目标是使用 raspberry 作为第 2 层桥接器,这样两个网络就可以作为一个广泛的网络。我尝试设置网络接口,将无线连接设置为“共享给其他计算机”,但我仍然无法从无线网络上的一台计算机与连接到机器人上的交换机的 jetson nano 进行通信。我想知道您是否有任何提示?
答案1
有几种可能的解决方案。
不同的网络。
- 将机器人的内部网络设置为与 Wi-Fi 使用的网络地址不同的网络地址。
- 在 Raspbery 中打开路由。
- 在 DHCP 服务器(可能是在 Wi-Fi 路由器中)中为 Raspberry Wi-Fi 接口设置静态保留,以便 Raspberry 始终具有相同的 IP 地址。
- 在(Wi-Fi)网络路由器上设置静态路由,该路由将指向机器人的Wi-Fi地址,作为机器人内部网络所在的点。
Raspberry 将有两个接口,每个接口位于不同的网络中。启用路由将允许数据通过 Rasperry。Wi-Fi 路由器中的静态路径将帮助其他设备找到并查看机器人的内部网络。
桥
在接口之间创建 L2 桥接。使用以下手册之一执行此操作:
ETC。
正确设置网桥并不像乍看起来那么简单。特别是对于那些没有以不同方式创建和设置网络接口经验的人来说。