

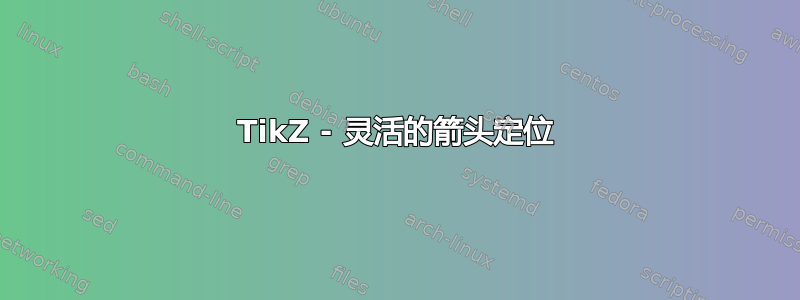
以下 MWE 正在转换为所需的tikz图片,但代码对于调整不是很有用。特别是通过使用毫米信息定义坐标,一些箭头的定位非常糟糕。虚线框也是如此。有人知道更智能的解决方案来定义这些坐标吗?
% document class
\documentclass{scrreprt}
\usepackage[utf8]{inputenc}
% layout (geometry, single page, margins)
\usepackage[a4paper,left=100pt,right=100pt,top=70pt,bottom=70pt,includeheadfoot]{geometry}
% colorized fonts and frames
\usepackage[table]{xcolor}
\definecolor{anti-flashwhite}{rgb}{0.95, 0.95, 0.96}
% flow chart diagrams
\usepackage{tikz}
\usetikzlibrary{arrows.meta,babel,positioning,graphs}
\usepackage[european,siunitx]{circuitikz}
\tikzstyle{block} = [draw, fill=anti-flashwhite, rectangle, minimum height=10mm, minimum width=10mm]
\tikzstyle{sum} = [draw, fill=anti-flashwhite, circle,inner sep=1mm, node distance=20mm]
\tikzstyle{input} = [coordinate]
\tikzstyle{output} = [coordinate]
\tikzstyle{branch} = [circle,inner sep=0pt,minimum size=1mm,fill=black,draw=black]
\tikzstyle{pinstyle} = [pin edge={<-,thin,black},pin distance=10mm]
\tikzstyle{skip loop} = [to path={-- ++(0,#1) -| (\tikztotarget)}]
\tikzstyle{hv path} = [style={to path={-| (\tikztotarget)}}]
\tikzstyle{vh path} = [style={to path={|- (\tikztotarget)}}]
\begin{document}
\begin{center}
\begin{tikzpicture}[auto, node distance=20mm,>=latex']
% inputs
\node [input] (inputx) {};
\node [input] (inputy) [below of =inputx, node distance=40mm] {};
% sums
\node [sum] (sumx1) [right of=inputx, node distance=15mm] {};
\node [sum] (sumy1) [right of=inputy, node distance=15mm] {};
% controllers
\node [block] (reglerx) [right of=sumx1] {Regler $X$};
\node [block] (reglery) [right of=sumy1] {Regler $Y$};
% magnets
\node [block] (magnet1) [right of=reglerx, node distance=40mm] {Magnet 1};
\node [block] (magnet2) [below of=magnet1] {Magnet 2};
\node [block] (magnet3) [right of=reglery, node distance=40mm] {Magnet 3};
% sums
\node [sum] (sumx2) [right of=magnet1] {};
\node [sum] (sumy2) [right of=magnet3] {};
% pendulums
\node [block] (pendulumx) [right of=sumx2] {Pendel $X$};
\node [block] (pendulumy) [right of=sumy2] {Pendel $Y$};
% branches
\node [branch] (valuex) [right of=pendulumx, node distance=15mm] {};
\node [branch] (valuey) [right of=pendulumy, node distance=15mm] {};
\node [branch] (dotx) [above of=valuex] {};
\node [branch] (doty) [below of=valuey] {};
\node [branch] (nonlinearx) at (55mm,30mm) {};
\node [branch] (nonlineary) at (58mm,-70mm) {};
% outputs
\node [output] (outputx) [right of=valuex, node distance=10mm] {};
\node [output] (outputy) [right of=valuey, node distance=10mm] {};
% differentiator
\node [block] (diffx) [above of=magnet1] {$\frac{d x}{d t}$};
\node [block] (diffy) [below of=magnet3] {$\frac{d y}{d t}$};
% arrows
\draw [->] (inputx) -- node {$x_{soll}$} (sumx1);
\draw [->] (inputy) -- node {$y_{soll}$} (sumy1);
\draw [->] (sumx1) -- (reglerx);
\draw [->] (sumy1) -- (reglery);
\draw [->] (reglerx) -- (magnet1);
\draw [->] (reglerx.east) -- (magnet2.west);
\draw [->] (reglerx.east) -- (magnet3.west);
\draw [->] (reglery.east) -- (magnet1.west);
\draw [->] (reglery.east) -- (magnet2.west);
\draw [->] (reglery) -- (magnet3);
\draw [->] (magnet1.east) -- (sumx2);
\draw [->] (magnet1.east) -- (sumy2);
\draw [->] (magnet2.east) -- (sumx2);
\draw [->] (magnet2.east) -- (sumy2);
\draw [->] (magnet3.east) -- (sumx2);
\draw [->] (magnet3.east) -- (sumy2);
\draw [->] (sumx2) -- (pendulumx);
\draw [->] (sumy2) -- (pendulumy);
\draw (pendulumx) -- (valuex);
\draw (pendulumy) -- (valuey);
\draw [->] (valuex) -- node {$x$} (outputx);
\draw [->] (valuey) -- node {$y$} (outputy);
\draw (valuex) -- (dotx);
\draw (valuey) -- (doty);
\draw [->] (dotx) -- (diffx);
\draw [->] (doty) -- (diffy);
\graph{(diffx) ->[hv path] (reglerx)};
\graph{(diffy) ->[hv path] (reglery)};
\coordinate (x1) at (65.5mm,3mm);
\coordinate (y1) at (65.5mm,-3mm);
\coordinate (x2) at (65.6mm,-17mm);
\coordinate (y2) at (65.7mm,-23mm);
\coordinate (x3) at (65.6mm,-37mm);
\coordinate (y3) at (65.7mm,-43mm);
\graph{(nonlinearx) ->[vh path, color=red] (x1)};
\graph{(nonlinearx) ->[vh path, color=red] (x2)};
\graph{(nonlinearx) ->[vh path, color=red] (x3)};
\graph{(nonlineary) ->[vh path, color=red] (y1)};
\graph{(nonlineary) ->[vh path, color=red] (y2)};
\graph{(nonlineary) ->[vh path, color=red] (y3)};
% feedback loops
\path (dotx) edge [->,skip loop=10mm] (sumx1);
\path (doty) edge [->,skip loop=-10mm] (sumy1);
% labels
\coordinate [label=$\dot{x}$] (dotxsign) at (32mm,6mm);
\coordinate [label=$\dot{y}$] (dotysign) at (32mm,-52mm);
% dashed frame
\draw (52mm,35mm) [dashed,thick, color=blue] -- (132mm,35mm);
\draw (132mm,35mm) [dashed,thick, color=blue] -- (132mm,-75mm);
\draw (132mm,-75mm) [dashed,thick, color=blue] -- (52mm,-75mm);
\draw (52mm,-75mm) [dashed,thick, color=blue] -- (52mm,35mm);
% controller communication
\coordinate (x4) at (32mm,-5mm);
\coordinate (x5) at (38mm,-5mm);
\coordinate (y4) at (32mm,-35mm);
\coordinate (y5) at (38mm,-35mm);
\draw [->, ultra thick,dotted] (x4) -- (y4);
\draw [->, ultra thick,dotted] (y5) -- (x5);
\end{tikzpicture}
\end{center}
\end{document}
答案1
您可以使用 和 来定义您的目标xshift。yshift您的蓝色框架更容易绘制为rectangle。
% arara: pdflatex
\documentclass{article}
\usepackage{tikz}
\usetikzlibrary{positioning,calc}
\usepackage[utf8]{inputenc}
\definecolor{myColor1}{named}{red}
\definecolor{myColor2}{named}{blue}
\definecolor{anti-flashwhite}{rgb}{0.95, 0.95, 0.96}
\usepackage[european,siunitx]{circuitikz}
\newcommand{\od}[3][]{\frac{\dif^{#1}#2}{\dif#3^{#1}}}
\begin{document}
\begin{figure}
\centering
\begin{tikzpicture}[%
,auto
,>=latex'
,block/.style={text height=1.5ex,text depth=.25ex,draw, fill=anti-flashwhite, rectangle, minimum height=10mm, minimum width=10mm}
,sum/.style={draw, fill=anti-flashwhite, circle,inner sep=1mm, node distance=20mm}
,input/.style={coordinate}
,output/.style={coordinate}
,branch/.style={circle,inner sep=0pt,minimum size=1mm,fill=black,draw=black}
,skip loop/.style={to path={-- ++(0,#1) -| (\tikztotarget)}}
,frame/.style={dashed,thick,myColor2}
]
\draw
% inputs
node [input] (inputx) {}
node [input] (inputy) [below = 40mm of inputx] {}
% sums
node [sum] (sumx1) [right = 15mm of inputx] {}
node [sum] (sumy1) [right = 15mm of inputy] {}
% controllers
node [block] (reglerx) [right = of sumx1] {Regler $X$}
node [block] (reglery) [right = of sumy1] {Regler $Y$}
% magnets
node [block] (magnet1) [right = 30mm of reglerx] {Magnet 1}
node [block] (magnet2) [below = of magnet1] {Magnet 2}
node [block] (magnet3) [right = 30mm of reglery] {Magnet 3}
% sums
node [sum] (sumx2) [right = of magnet1] {}
node [sum] (sumy2) [right = of magnet3] {}
% pendulums
node [block] (pendulumx) [right = of sumx2] {Pendel $X$}
node [block] (pendulumy) [right = of sumy2] {Pendel $Y$}
% branches
node [branch] (valuex) [right = of pendulumx] {}
node [branch] (valuey) [right = of pendulumy] {}
node [branch] (dotx) [above = 19mm of valuex] {}
node [branch] (doty) [below = 19mm of valuey] {}
node [branch] (nonlinearx) [above = 24.5mm of reglerx, xshift=20mm] {}
node [branch] (nonlineary) [below = 24.5mm of reglery, xshift=25mm] {}
% outputs
node [output] (outputx) [right = 15mm of valuex] {}
node [output] (outputy) [right = 15mm of valuey] {}
% differentiator
node [block] (diffx) [above = of magnet1] {$\od{x}{t}$}
node [block] (diffy) [below = of magnet3] {$\od{y}{t}$};
% arrows
\path
(inputx) edge[->] node {$x_\text{soll}$} (sumx1)
(sumx1) edge[->] (reglerx)
(reglerx) edge[->] (magnet1)
(magnet1) edge[->] (sumx2)
(sumx2) edge[->] (pendulumx)
(pendulumx) edge[->] (valuex)
(valuex) edge[->] node {$x$} (outputx);
\path
(inputy) edge[->] node {$y_\text{soll}$} (sumy1)
(sumy1) edge[->] (reglery)
(reglery) edge[->] (magnet3)
(magnet3) edge[->] (sumy2)
(sumy2) edge[->] (pendulumy)
(pendulumy) edge[->] (valuey)
(valuey) edge[->] node {$y$} (outputy);
\draw [->] (reglerx.east) -- (magnet2.west);
\draw [->] (reglerx.east) -- (magnet3.west);
\draw [->] (reglery.east) -- (magnet1.west);
\draw [->] (reglery.east) -- (magnet2.west);
\draw [->] (magnet1.east) -- (sumy2);
\draw [->] (magnet2.east) -- (sumx2);
\draw [->] (magnet2.east) -- (sumy2);
\draw [->] (magnet3.east) -- (sumx2);
\draw (valuex) -- (dotx);
\draw (valuey) -- (doty);
\draw [->] (dotx) -- (diffx);
\draw [->] (doty) -- (diffy);
\draw[->] (diffx) -| node[near end] {$\dot{x}$} (reglerx);
\draw[->] (diffy) -| node[near end] {$\dot{y}$} (reglery);
\draw[->, color=myColor1] (nonlinearx) |- ([yshift=2.5mm]magnet1.west);
\draw[->, color=myColor1] (nonlinearx) |- ([yshift=2.5mm]magnet2.west);
\draw[->, color=myColor1] (nonlinearx) |- ([yshift=2.5mm]magnet3.west);
\draw[->, color=myColor1] (nonlineary) |- ([yshift=-2.5mm]magnet1.west);
\draw[->, color=myColor1] (nonlineary) |- ([yshift=-2.5mm]magnet2.west);
\draw[->, color=myColor1] (nonlineary) |- ([yshift=-2.5mm]magnet3.west);
% feedback loops
\path (dotx) edge[->,skip loop=10mm] (sumx1);
\path (doty) edge [->,skip loop=-10mm] (sumy1);
% dashed frame
\draw [frame] ([yshift=10,xshift=-10]nonlinearx) rectangle ([yshift=-38.5,xshift=10]doty);
% controller communication
\draw[->, ultra thick,dotted] ([xshift=-2.5mm]reglerx.south) -- ([xshift=-2.5mm]reglery.north);
\draw[->, ultra thick,dotted] ([xshift=2.5mm]reglery.north) -- ([xshift=2.5mm]reglerx.south);
\end{tikzpicture}
\end{figure}
\end{document}
