

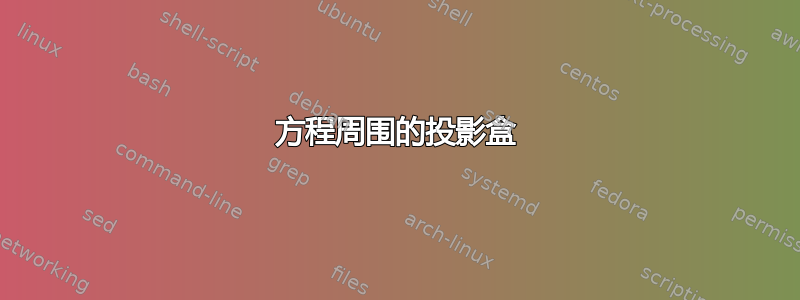

我怎样才能像左边那样在方程式周围制作一个漂亮的框?我自己尝试了很多次,但没有得到令人满意的结果!
答案1
以下是一些选项,empheq并tcolorbox采用以下代码这个答案。
\documentclass{article}
\usepackage[svgnames,hyperref]{xcolor}
\usepackage{empheq}
\usepackage[many]{tcolorbox}
%\tcbuselibrary{skins}
\tcbset{highlight math style={enhanced,
colframe=red!60!black,colback=yellow!50!white,arc=4pt,boxrule=1pt,
}}
\newtcbox{\mybox}[1][]{nobeforeafter,math upper,tcbox raise base,
enhanced,frame hidden,boxrule=0pt,interior style={top color=green!10!white,
bottom color=green!10!white,middle color=green!50!yellow},
fuzzy halo=1pt with green,drop large lifted shadow,#1}
\begin{document}
\begin{empheq}[box=\tcbhighmath]{align}
a&=b\\
E&=mc^2 + \int_a^a x\, dx
\end{empheq}
\begin{empheq}[box={\tcbhighmath[colback=blue!20!white,arc=0pt,outer arc=0pt,toprule=0pt,drop large lifted shadow]}]{align}
a&=b\\
E&=mc^2 + \int_a^a x\, dx
\end{empheq}
\begin{empheq}[box=\mybox]{align}
a&=b\\
E&=mc^2 + \int_a^a x\, dx
\end{empheq}
\end{document}
答案2
这应该是一个起点。我用它tcolorbox来画一个漂亮的方程框。字体是biolinum。
\documentclass[9pt]{beamer}
\usefonttheme[onlymath]{serif}
\setbeamertemplate{itemize item}[circle]
\defbeamertemplate{footline}{sky blue}
{
\leavevmode%
\hbox{\begin{beamercolorbox}[wd=\paperwidth,ht=2.5ex,dp=1.125ex,leftskip=1em,rightskip=1em]{frametitle}%
\insertshortauthor\hfill\insertshorttitle\hfill\insertframenumber\,/\,\inserttotalframenumber
\end{beamercolorbox}}%
\vskip0pt%
}
\setbeamertemplate{footline}[sky blue]
\setbeamertemplate{navigation symbols}{}
\usepackage{tcolorbox,mathtools,biolinum}
\tcbuselibrary{skins,theorems}
\definecolor{sblue}{HTML}{0049A9}
\definecolor{scyan}{HTML}{CBEAFC}
\definecolor{sred}{HTML}{B5595C}
\definecolor{sgreen}{HTML}{609B57}
\definecolor{spink}{HTML}{FFB0FF}
\setbeamercolor{frametitle}{fg=sblue,bg=scyan}
\newcommand\markit[1]{\textcolor{sblue}{#1}}
\newtcolorbox{fancyeqbox}[1][]{
enhanced,drop fuzzy midday shadow,
boxrule=0pt,arc=0pt,boxsep=0pt,
left=.5em,right=.5em,top=1ex,bottom=1ex,
colback=white,#1
}
\setlength{\leftmargini}{0pt}
\begin{document}
\title{Controllo di Processo e dei Sistemi di Produzione -- A.a.\ 2009/09}
\author{\textcopyright\ 2009 by A.\ Bemporad}
\begin{frame}{Receding horizon philosophy}
\begin{columns}[totalwidth=\linewidth]
\column{.5\linewidth}
\begin{itemize}
\item \underline{At time $t$:} solve and \markit{optimal control}
problem over a finite future horizon of \markit{$N$} steps:
\begin{fancyeqbox}[ams align*,width=\linewidth+.7cm,enlarge left by=-.7cm]
\min_{u_t,\ldots,u_{t+N-1}}
&\left\{ \sum_{k=0}^{N-1} \| {\color{sred} y_{t+k} - r(t)} \|^ 2 + \right. \\
&\quad\left. \rho \| {\color{sred} u_{t+k} - u_r(t)} \|^2 \right\} \\
\text{s.t.}\quad
& {\color{sblue} x_{t+k+1} = f(x_{t+k},u_{t+k})} \\
& {\color{sblue} y_{t+k} = g(x_{t+k},u_{t+k})} \\
& {\color{sgreen} u_{\mathrm{min}} \leq u_{t+k} \leq u_{\mathrm{max}}} \\
& {\color{sgreen} y_{\mathrm{min}} \leq y_{t+k} \leq y_{\mathrm{max}}} \\
& x_{t} = x(t), k=0,\ldots,N-1
\end{fancyeqbox}
\end{itemize}
\column{.5\linewidth}
\centering
\includegraphics[width=.7\linewidth]{example-image-golden-upright}
\end{columns}
\begin{itemize}
\item Only apply the firt optimal move \markit{$u^*(t)$}
\item \underline{At time $t+1$:} \markit{Get new measurements},
repeat the optimization. And so on\ldots
\end{itemize}
\begin{center}
\colorbox{spink}{Advantage of repeated on-line optimization: \textcolor{red}{FEEDBACK!}}
\end{center}
\end{frame}
\end{document}
