

我试图插入一个表格,但由于表格很长,我使用了命令longtable。但每页末尾都有一个很小的空间。有没有办法拆分单个单元格,从而正确利用空间?
另外,我可以稍微缩小表格以使文本仍然可读吗?

\def\doitems{\def\item{\par
\noindent\hbox to1.5em{\hss$\bullet$\hss}\hangindent=1.5em }}
\renewcommand{\arraystretch}{1.3}
%literature table
\begin{longtable}{|p{.090\textwidth}|p{.050\textwidth}|p{.35\textwidth}|p{.35\textwidth}|}
\caption{Summary of Some Latest Pattern Formation Methods.}
\label{liter_comp_table}
%\begin{tabular}
%\toprule
\hline
\textbf{Method} & \textbf{Year} & \textbf{Methodology} & \textbf{Limitations} \\ [0.2ex]\hline
\endhead
\cite{jiang2019decentralized} & 2019
&
A decentralized algorithm for generating a specified configuration with an arbitrary repeating pattern in a multi-robot system in two phases. Introduced a basic pattern graph to construct a basic pattern among robots then an assembling graph to assemble multiple basic patterns layer by layer until the final repeating pattern is formed.
& \doitems
\item The algorithm is head dependent which is responsible for maintaining the basic pattern.
\item Each robot's movement is dependent on the initial positions of other agents.
\\ [0.2ex]
答案1
- 任何(种类)长表都不能从行中间拆分。它只能在行之间拆分。
- 对于表中的列表,我将使用包
itemize启用的带有设置的列表enumitem。 - 对于表格,我建议使用包
longtblr中定义的表格tabularray。
\documentclass{article}
\usepackage{geometry}
\usepackage{enumitem}
\usepackage{etoolbox}
\AtBeginEnvironment{longtblr}%
{
\setlist[itemize]{nosep,
label=\textbullet,
leftmargin=*,
after=\end{minipage},
before=\begin{minipage}[t]{\linewidth}
}
}
\usepackage{tabularray}
\UseTblrLibrary{booktabs, varwidth}
\begin{document}
\begin{longtblr}[
caption = {Summary of Some Latest Pattern Formation Methods.},
label = {liter_comp_table},
]{hlines, vlines,
colspec={X[0.25,l] c X[j] X[j]},
colsep = 4pt,
row{1} = {font=\small\bfseries},
measure = vbox,
rowhead = 1
}
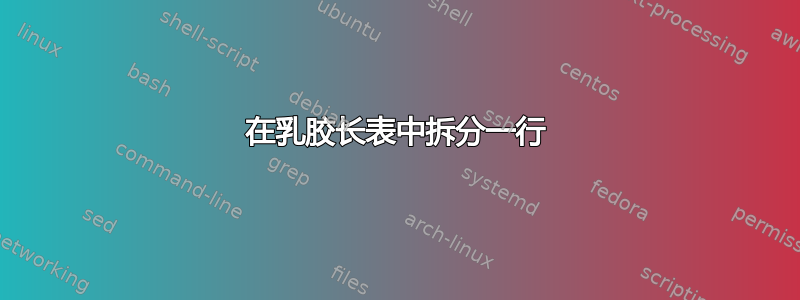
Method & Year & Methodology & Limitations \\
\cite{jiang2019decentralized}
& 2019 & A decentralized algorithm for generating a specified configuration with an arbitrary repeating pattern in a multi-robot system in two phases. Introduced a basic pattern graph to construct a basic pattern among robots then an assembling graph to assemble multiple basic patterns layer by layer until the final repeating pattern is formed.
& \begin{itemize}
\item The algorithm is head dependent which is responsible for maintaining the basic pattern.
\item Each robot's movement is dependent on the initial positions of other agents.
\end{itemize} \\
\cite{jiang2019decentralized}
& 2019 & A decentralized algorithm for generating a specified configuration with an arbitrary repeating pattern in a multi-robot system in two phases. Introduced a basic pattern graph to construct a basic pattern among robots then an assembling graph to assemble multiple basic patterns layer by layer until the final repeating pattern is formed.
& \begin{itemize}
\item The algorithm is head dependent which is responsible for maintaining the basic pattern.
\item Each robot's movement is dependent on the initial positions of other agents.
\end{itemize} \\
\cite{jiang2019decentralized}
& 2019 & A decentralized algorithm for generating a specified configuration with an arbitrary repeating pattern in a multi-robot system in two phases. Introduced a basic pattern graph to construct a basic pattern among robots then an assembling graph to assemble multiple basic patterns layer by layer until the final repeating pattern is formed.
& \begin{itemize}
\item The algorithm is head dependent which is responsible for maintaining the basic pattern.
\item Each robot's movement is dependent on the initial positions of other agents.
\end{itemize} \\
\cite{jiang2019decentralized}
& 2019 & A decentralized algorithm for generating a specified configuration with an arbitrary repeating pattern in a multi-robot system in two phases. Introduced a basic pattern graph to construct a basic pattern among robots then an assembling graph to assemble multiple basic patterns layer by layer until the final repeating pattern is formed.
& \begin{itemize}
\item The algorithm is head dependent which is responsible for maintaining the basic pattern.
\item Each robot's movement is dependent on the initial positions of other agents.
\end{itemize} \\
\cite{jiang2019decentralized}
& 2019 & A decentralized algorithm for generating a specified configuration with an arbitrary repeating pattern in a multi-robot system in two phases. Introduced a basic pattern graph to construct a basic pattern among robots then an assembling graph to assemble multiple basic patterns layer by layer until the final repeating pattern is formed.
& \begin{itemize}
\item The algorithm is head dependent which is responsible for maintaining the basic pattern.
\item Each robot's movement is dependent on the initial positions of other agents.
\end{itemize} \\
\cite{jiang2019decentralized}
& 2019 & A decentralized algorithm for generating a specified configuration with an arbitrary repeating pattern in a multi-robot system in two phases. Introduced a basic pattern graph to construct a basic pattern among robots then an assembling graph to assemble multiple basic patterns layer by layer until the final repeating pattern is formed.
& \begin{itemize}
\item The algorithm is head dependent which is responsible for maintaining the basic pattern.
\item Each robot's movement is dependent on the initial positions of other agents.
\end{itemize} \\
\end{longtblr}
\end{document}
