

如果有必要的话,我使用 win edit 作为编辑器。
\documentclass[12pt,a4paper]{article}
\usepackage{amsmath}\usepackage{amssymb}
\textwidth=16.5cm \oddsidemargin=-0.10cm \evensidemargin=-0.10cm \topmargin=-1.0cm \textheight=24.5cm
\newcommand{\piRsquare}{\pi r^2}
\title{The small amplitude expansion: The class of theoritical considered}
\author{xyz }
\date{January 26, 2013}
\begin{document} \baselineskip=18pt
\section{Reconstruction of the article equation(15)}
Given, $$\phi_1= p_1\cos(\tau+\alpha)$$
$$\nabla\phi_1= -p_1\sin(\tau+\alpha) \nabla \alpha+\nabla p_1cos(\tau+\alpha)$$
$$\Delta\phi_1= -p_1 \nabla \alpha \cos(\tau+\alpha) \nabla \alpha-p_1 \sin(\tau+\alpha) \Delta\alpha -\nabla \alpha \sin(\tau+\alpha)\nabla p_1-\nabla p_1 \nabla \alpha \sin(\tau+ \alpha)+\Delta p_1\cos(\tau+\alpha)$$
$$\Delta\phi_1= \cos(\tau+\alpha) [-p_1 \Delta \alpha + \Delta p_1]- \sin(\tau+\alpha) [p_1\Delta \alpha+2\nabla \alpha \nabla p_1]$$
Differentiating $\phi_1$,
$$\phi_1= p_1cos(\tau+\alpha)$$
$$\dot\phi_1= -p_1 sin(\tau+\alpha)$$
$$\ddot\phi_1= -p_1cos(\tau+\alpha)$$
Again,
$$\phi_2 = p_2\cos(\tau + \alpha) + q_2\sin(\tau + \alpha) + \frac{g_2}{6}p_1^2[\cos(2\tau + 2\alpha) - 3] $$
$\omega_1=0$ for the bounding conditions.
$$\dot\phi_2 = -p_2\sin(\tau + \alpha) + q_2\cos(\tau + \alpha) + \frac{g_2}{6}p_1^2[-2 \sin(2\tau + 2\alpha) ] $$
$$\ddot\phi_2 = -p_2\cos(\tau + \alpha)- q_2\sin(\tau + \alpha) - \frac{4g_2}{6}p_1^2[\cos(2\tau + 2\alpha) ] $$
Putting these values in equation,
\begin{align}
\ddot\phi_3+\phi_3+2g_2\phi_1\phi_2+g_3\phi_1^3-\ddot\phi_1-\Delta\phi_1+\omega_1\ddot\phi_2+\omega_2\ddot\phi_1 =0 \\
\ddot\phi_3+\phi_3+2g_2p_1 \cos(\tau+\alpha)[p_2\cos(\tau + \alpha) + q_2\sin(\tau + \alpha) + \frac{g_2}{6}p_1^2[\cos(2\tau + 2\alpha) - 3]] +g_3p^3_1\cos^3(\tau+\alpha)-\cos(\tau+\alpha) [-p_1 \Delta \alpha+\Delta p_1] -\sin(\tau+\alpha) [p_1\Delta \alpha+2\nabla \alpha \nabla p_1] +\omega_2p_1\cos(\tau+\alpha)=0
\end{align}
\begin{align}
\ddot\phi_3+\phi_3+g_2p_1 p_2 [1+\cos2(\tau+\alpha)] + g_2p_1 q_2\sin2(\tau+\alpha) + \frac{2 g_2^2 p_1^3}{6} \cos(\tau +\alpha)[2\cos^2(\tau+\alpha)-4]
+ g_3p_1^3[\frac{1}{4}(3\cos(\tau +\alpha)+\cos3(\tau+\alpha))]+ p_1\cos(\tau+\alpha) -\cos(\tau+\alpha)[\Delta p_1-p_1 \Delta\alpha] +\sin(\tau+\alpha)[p_1\Delta \alpha+2 \nabla p_1 \nabla \alpha]+ \omega_2p_1\cos(\tau+\alpha) =0
\end{align}
\begin{align}
\ddot\phi_3+\phi_3+g_2p_1 p_2 + g_2p_1 p_2 \cos2(\tau+\alpha)] + g_2p_1 q_2\sin2(\tau+\alpha) + \frac{2 g_2^2 p_1^3}{3} \cos^3(\tau +\alpha)-\frac{8 g_2^2 p_1^3}{6} \cos(\tau +\alpha)+g_3p_1^3[\frac{1}{4}(3\cos(\tau +\alpha)+\cos3(\tau+\alpha))]+p_1\cos(\tau+\alpha)-\cos(\tau+\alpha)[\Delta p_1-p_1 \Delta \alpha]+\sin(\tau+\alpha)[p_1\Delta \alpha+2 \nabla p_1 \nabla \alpha]+\omega_2p_1\cos(\tau+\alpha)=0
\end{align}
\begin{align}
\ddot\phi_3+\phi_3+g_2p_1 p_2 + g_2p_1 p_2 cos2(\tau+\alpha)] + g_2p_1 q_2sin2(\tau+\alpha) + \frac{2 g_2^2 p_1^3}{3}[\frac{1}{4}(3cos(\tau +\alpha)+cos3(\tau+\alpha))] -\frac{8 g_2^2 p_1^3}{6} \cos(\tau +\alpha)+g_3p_1^3[\frac{1}{4}(3\cos(\tau +\alpha)+\cos3(\tau+\alpha))] +p_1\cos(\tau+\alpha)-\cos(\tau+\alpha)[\Delta p_1-p_1 \Delta \alpha]+\sin(\tau+\alpha)[p_1\Delta \alpha+2 \nabla p_1 \nabla \alpha]+\omega_2p_1\cos(\tau+\alpha)=0
\end{align}
\begin{align}
\ddot\phi_3+\phi_3+sin(\tau+\alpha)[p_1\Delta \alpha+2 \nabla p_1 \nabla \alpha] -\cos(\tau+ \alpha)[\Delata p_1 - p_1\Delata\alpha+\frac{5}{6}g_2^2p_1^3- \frac{3}{4}g_3p_1^3-p_1 +\omega_2 p_1] +\frac{ p_1^3}{12}(2g_2^2+3g_3)\cos3(\tau + \alpha)+g_2 p_1 [p_2+ p_2 cos2(\tau +\alpha)+q_2 \sin2(\tau+\alpha)] =0
\end{align}
\begin{align}
\ddot\phi_3+\phi_3+sin(\tau+\alpha)[p_1\Delta \alpha+2 \nabla p_1 \nabla \alpha] -\cos(\tau+ \alpha)[\Delta p_1-p_1\Delta \alpha \\ + \lambda p_1^3-p_1+\omega_2 p_1] +\frac{p_1^3}{12}(2g_2^2+3g_3)\cos3(\tau + \alpha)+g_2 p_1 [p_2+ p_2 \cos2(\tau +\alpha)+q_2 \sin2(\tau+\alpha)]=0
\end{align}
\end{document}
答案1
正如评论中提到的,请注意宏名称中的拼写错误(在您的例子中\delata是\delta)。您可以使用split环境在长方程式中引入换行符。这是一个有效的(虽然不太赏心悦目)示例,其中包含您的一个长方程式:
\documentclass[12pt,a4paper]{article}
\usepackage{amsmath}
\usepackage{amssymb}
\begin{document}
\begin{equation}
\begin{split}
& \ddot\phi_3+\phi_3+sin(\tau+\alpha)[p_1\Delta \alpha+2 \nabla p_1 \nabla \alpha] \\
& \qquad -\cos(\tau+ \alpha)[\Delta p_1 - p_1\Delta\alpha+\frac{5}{6}g_2^2p_1^3- \frac{3}{4}g_3p_1^3-p_1 +\omega_2 p_1]
+\frac{ p_1^3}{12}(2g_2^2+3g_3)\cos3(\tau + \alpha) \\
& \qquad +g_2 p_1 [p_2+ p_2 cos2(\tau +\alpha)+q_2 \sin2(\tau+\alpha)] =0
\end{split}
\end{equation}
\end{document}
Marc Van Dongen (LaTeX & Friends) 建议添加换行符:
- 在 + 或 - 符号之前,以及
\qquad下一行, - 在 × 符号之前,以及
\qquad下一行上。
答案2
您的代码存在许多问题(除了行数过长之外):
- 在一些情况下,拼写错误
\Delata会立即引发错误。(代码中可能还存在其他数学错误,而不是 TeX 语法错误。) - 在许多情况下省略
\之前sin和cos - 使用 Plain-TeX
$$指令,而不是更强大/稳定的指令 - 该组中的方程式
align似乎没有任何对齐点 - 长串的数学运算,没有连接短语或解释发生了什么。除非你的目标读者已经知道发生了什么,否则你应该考虑提供更多的“连接组织”,向读者发出论证方向的信号。
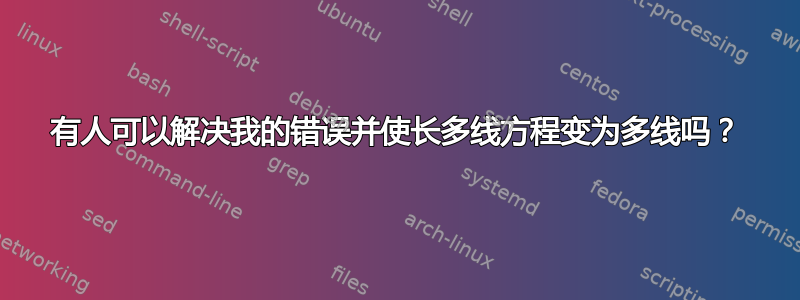
以下代码执行以下操作:
- 一致使用
align和align*环境 - 长组编号对齐方程的“对齐”方式如下:每个方程的第一项向左突出一点,后续行在第一个
+或-运算符上对齐 - 我已将
[和]括号替换为\bigl[和\bigr]指令 - 小东西:(i)设置
\allowdisplaybreaks允许 LaTeX 在必要时插入分页符;(ii)一些\phantom{-}说明,以便更好地对齐某些方程式的右侧;(iii)修复语法错误并\在“sin”和“cos”之前插入缺失值;(iv)使用该geometry包代替大量 TeX 基元来设置页面几何形状;(v)使用该setspace包代替摆弄低级\baselineskip参数;(vi)对“结缔组织”的建议以帮助读者。
几乎肯定有更好的方法来选择一些换行符,但希望下面的代码能够成为一个良好的起点。
\documentclass[12pt,a4paper]{article}
\usepackage{amsmath}
\allowdisplaybreaks
\usepackage{amssymb}
%\textwidth=16.5cm \oddsidemargin=-0.10cm \evensidemargin=-0.10cm \topmargin=-1.0cm \textheight=24.5cm
\usepackage[margin=2cm]{geometry}
\newcommand{\piRsquare}{\pi r^2}
\usepackage{setspace}
\setstretch{1.15}
\begin{document}
%\section{Reconstruction of the article equation(15)}
Given:
\begin{align*}
\phi_1 &= p_1\cos(\tau+\alpha)\\
\nabla\phi_1 &= -p_1\sin(\tau+\alpha) \nabla \alpha+\nabla p_1\cos(\tau+\alpha)\\
\Delta\phi_1 &= -p_1 \nabla \alpha \cos(\tau+\alpha) \nabla \alpha-p_1
\sin(\tau+\alpha) \Delta\alpha -\nabla \alpha \sin(\tau+\alpha)\nabla p_1\\
&\qquad{}-\nabla p_1 \nabla \alpha \sin(\tau+ \alpha)+\Delta p_1\cos(\tau+\alpha)\\
\Delta\phi_1&= \cos(\tau+\alpha) \bigl[-p_1 \Delta \alpha + \Delta p_1\bigr]-
\sin(\tau+\alpha) \bigl[p_1\Delta \alpha+2\nabla \alpha \nabla p_1\bigr]
\end{align*}
Differentiating $\phi_1$ [with respect to $\tau$]:
\begin{align*}
\phi_1 &= \phantom{-}p_1\cos(\tau+\alpha)\\
\dot\phi_1 &= -p_1 \sin(\tau+\alpha)\\
\ddot\phi_1&= -p_1\cos(\tau+\alpha)
\end{align*}
Again,
\begin{align*}
\phi_2 &= \phantom{-}p_2\cos(\tau + \alpha) +
q_2\sin(\tau + \alpha) +
\frac{g_2}{6}p_1^2\bigl[\cos(2\tau + 2\alpha) - 3\bigr]
\intertext{$\omega_1=0$ for the bounding conditions.}
\dot\phi_2 &= -p_2\sin(\tau + \alpha) + q_2\cos(\tau + \alpha) +
\frac{g_2}{6}p_1^2\bigl[-2 \sin(2\tau + 2\alpha) \bigr] \\
\ddot\phi_2 &= -p_2\cos(\tau + \alpha)- q_2\sin(\tau + \alpha) -
\frac{4g_2}{6}p_1^2\bigl[\cos(2\tau + 2\alpha) \bigr]
\end{align*}
Putting these values in equation [xx] [leads to the following first-order conditions (??)]:
\begin{align}
\ddot\phi_3{}+{}&\phi_3+2g_2\phi_1\phi_2+g_3\phi_1^3-\ddot\phi_1
-\Delta\phi_1+\omega_1\ddot\phi_2+\omega_2\ddot\phi_1 =0\\
\ddot\phi_3{}+{}&\phi_3+2g_2p_1 \cos(\tau+\alpha)\bigl[p_2\cos(\tau + \alpha) +
q_2\sin(\tau + \alpha)\bigr] \notag\\
{}+{}&\frac{g_2}{6}p_1^2\bigl[\cos(2\tau + 2\alpha) - 3\bigr]\bigr] +g_3p^3_1\cos^3
(\tau+\alpha)-\cos(\tau+\alpha) \bigl[-p_1 \Delta \alpha+\Delta p_1\bigr] \notag\\
{}-{}&\sin(\tau+\alpha) \bigl[p_1\Delta \alpha+2\nabla \alpha \nabla p_1\bigr]
+\omega_2p_1\cos(\tau+\alpha)=0\\
\ddot\phi_3{}+{}&+\phi_3+g_2p_1 p_2 \bigl[1+\cos2(\tau+\alpha)\bigr] +
g_2p_1 q_2\sin2(\tau+\alpha) \notag\\
{}+{}&\frac{2 g_2^2 p_1^3}{6} \cos(\tau +\alpha)\bigl[2\cos^2(\tau+\alpha)-4\bigr]
+ g_3p_1^3\bigl[\frac{1}{4}(3\cos(\tau +\alpha)+\cos3(\tau+\alpha))\bigr] \notag\\
{}+{}&p_1\cos(\tau+\alpha) -\cos(\tau+\alpha)\bigl[\Delta p_1-p_1 \Delta\alpha\bigr]
+\sin(\tau+\alpha)\bigl[p_1\Delta \alpha+2 \nabla p_1 \nabla \alpha\bigr]\notag\\
{}+{}&\omega_2p_1\cos(\tau+\alpha) =0\\
\ddot\phi_3{}+{}&\phi_3+g_2p_1 p_2 + g_2p_1 p_2 \cos2(\tau+\alpha)\bigr] +
g_2p_1 q_2\sin2(\tau+\alpha) \notag\\
{}+{}&\frac{2 g_2^2 p_1^3}{3} \cos^3(\tau +\alpha)-\frac{8 g_2^2 p_1^3}{6}
\cos(\tau +\alpha)\notag\\
{}+{}&g_3p_1^3\bigl[\frac{1}{4}(3\cos(\tau +\alpha) +\cos3(\tau+\alpha))\bigr]+
p_1\cos(\tau+\alpha)\notag\\
{}-{}&\cos(\tau+\alpha)\bigl[\Delta p_1-p_1 \Delta \alpha\bigr] +\sin(\tau+\alpha)
\bigl[p_1\Delta \alpha+2 \nabla p_1 \nabla \alpha\bigr]\notag\\
{}+{}&\omega_2p_1\cos(\tau+\alpha)=0\\
\ddot\phi_3{}+{}&\phi_3+g_2p_1 p_2 + g_2p_1 p_2 \cos2(\tau+\alpha)\bigr] +
g_2p_1 q_2\sin2(\tau+\alpha) \notag\\
{}+{}&\frac{2 g_2^2 p_1^3}{3}\bigl[\frac{1}{4}(3\cos(\tau +\alpha)+\cos3
(\tau+\alpha))\bigr] -\frac{8 g_2^2 p_1^3}{6} \cos(\tau +\alpha)\notag\\
{}+{}&g_3p_1^3\bigl[\frac{1}{4}(3\cos(\tau +\alpha)+ \cos3(\tau+\alpha))\bigr]
+p_1\cos(\tau+\alpha)\notag\\
{}-{}&\cos(\tau+\alpha)\bigl[ \Delta p_1 -p_1 \Delta \alpha\bigr]
+\sin(\tau+\alpha)\bigl[p_1\Delta \alpha+2 \nabla p_1 \nabla \alpha\bigr]\notag\\
{}+{}&\omega_2p_1\cos(\tau+\alpha)=0\\
\ddot\phi_3{}+{}&\phi_3+\sin(\tau+\alpha)\bigl[p_1\Delta \alpha+2 \nabla p_1
\nabla \alpha\bigr]
-\cos(\tau+ \alpha)\bigl[\Delta p_1 - p_1\Delta\alpha\notag\\
{}+{}&\frac{5}{6}g_2^2p_1^3 - \frac{3}{4}g_3p_1^3-p_1
+\omega_2 p_1\bigr] +\frac{ p_1^3}{12}(2g_2^2+3g_3)\cos3(\tau + \alpha)\notag\\
{}+{}&g_2 p_1 \bigl[p_2+ p_2 \cos2(\tau +\alpha)+q_2 \sin2(\tau+\alpha)\bigr] =0\\
\ddot\phi_3{}+{}&\phi_3+\sin(\tau+\alpha)\bigl[p_1\Delta \alpha+2 \nabla p_1
\nabla \alpha\bigr] \notag\\
{}-{}&\cos(\tau+ \alpha)\bigl[\Delta p_1-p_1\Delta \alpha + \lambda p_1^3-p_1+
\omega_2 p_1\bigr] \notag\\
{}+{}&\frac{p_1^3}{12}(2g_2^2+3g_3)\cos3(\tau + \alpha)+g_2 p_1 \bigl[p_2+ p_2
\cos2(\tau +\alpha)\notag\\
{}+{}&q_2 \sin2(\tau+\alpha)\bigr]=0
\end{align}
\end{document}

