

这是我在 的第一周。我最近为班级和beamer准备tcolorbox了一个幻灯片演示。程序运行良好,但我遇到了一个小问题:在每张幻灯片的后面留下了褪色的编号。你认为有什么方法可以防止这种情况发生?这是一个最小的工作示例:beamertcolorboxtcolorbox
\documentclass[slides]{beamer}
%\documentclass[a4wide,8pt]{extarticle}
\mode<presentation>{}
%Define usepackages
\usetheme{default}
\usepackage[utf8]{inputenc}
\usepackage{amsfonts}
\usepackage{graphicx} % for pdf, bitmapped graphics files
\usepackage{times} % assumes new font selection scheme installed
\usepackage{amsmath} %assumes amsmath package installed
\usepackage{amssymb}
\usepackage{amsfonts} % assumes amsmath package installed
\usepackage{color}
\usepackage{commath}
\usepackage{breqn}
\usepackage{tcolorbox}
\usepackage{hyperref}
\usepackage{xcolor}\hypersetup{linkbordercolor=green}
%Define colors
\definecolor{blue}{rgb}{0,0,1}
% %preamble and title page
\setbeamersize{text margin left = 0.2mm}
\setbeamersize{text margin right = 0.2mm}
\setbeamersize{sidebar width left= 0.3mm}
\setbeamersize{sidebar width right= 0.3mm}
\setbeamertemplate{itemize item}[triangle]
\setbeamertemplate{itemize subitem}[triangle]
%\setbeamercovered{transparent}
%\setbeamertemplate{navigation symbols}{}
%\setbeamertemplate{headline}
\tcbuselibrary{skins,breakable}
% Color Box layers
\tcbset{colframe=blue!75!black,fonttitle=\bfseries,
colback=green!5!white,
every box/.style={enhanced,watermark text=\thetcblayer,
before=\par\smallskip,after=\par\smallskip},
every box on layer 2/.style={reset,every box,colback=yellow!10!white,
drop fuzzy shadow}}
% Newt Color Box
\newtcolorbox{pabox}[1]{colback=red!5!white,
colframe=green!75!black,fonttitle=\bfseries,
title=#1}
%My green box
\newtcolorbox{mygreenbox}[2][]{%
enhanced,width=\linewidth-6pt,
enlarge top by=3pt,enlarge bottom by=3pt,
enlarge left by=3pt,enlarge right by=3pt,
title={#2},frame hidden,boxrule=0pt,top=1mm,bottom=1mm,
colframe=green!30!black, colbacktitle=green!50!yellow,
coltitle=black, colback=green!25!white,
borderline={0.5pt}{-0.5pt}{green!75!blue},
borderline={1pt}{-3pt}{green!50!blue},#1}
\begin{document}
\long\def\/*#1*/{} % Define block comment
% This starts Page 3
\begin{frame}{\color{cyan}\small Non-Lipschitzian Dynamics of a Continuous FTS Feedback Controller}
\begin{tcolorbox}[title = \small Overview of Problem]
\begin{itemize}
\item\tiny\color{blue} The design of FTS continuous time-invariant feedback controllers involve non-Lipschitzian closed-loop dynamics
\item Such controllers will exhibit non-unique solutions in backward time, i.e., better robustness and good disturbance rejection
\item Such non-unique (revert time) solutions would violate uniqueness conditions for Lipschitz differential equations
\end{itemize}
\begin{pabox}{\small Statement of Problem}
\begin{itemize}
\item\tiny\color{blue} Consider a rigid body rotating under the action of a mechanical torque about a fixed axis
\item Its equations of motion resemble those of a double integrator. States differ by $2n\pi$ (where $n = 0, 1, 2, \hdots$) in angular modes which correspond to the same physical configuration of the body.
\item State space for this system is $S^1 \times \mathbb{R}$ rather than $ \mathbb{R}^2$ \cite{Andronov}
\item Developing stabilizing controls for the double integrator on $ \mathbb{R}^2$ (translational double integrator) will lead to unwinding since the configuration space is actually $ \mathbb{R}$
\item This makes an interesting problem when designing feedback controllers for the rotational double integrator with anti-wind-up compensation
\item Discontinuous feedback controllers are practically infeasible due to the chattering they introduce because of plant uncertainties
\item They could also excite high-frequency dynamics when used in controlling lightly damped structures \cite{Baruh et. al.}
\end{itemize}
\end{pabox}
\end{tcolorbox}
\end{frame}
\end{document}
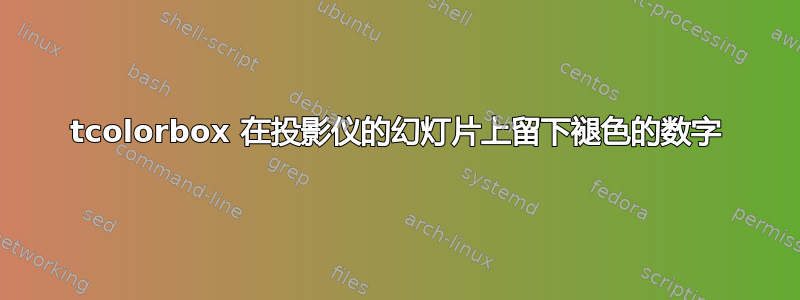
以下是带有不良背景数字的输出:
答案1
这冒犯代码是
\tcbset{colframe=blue!75!black,fonttitle=\bfseries,
colback=green!5!white,
every box/.style={enhanced,%watermark text=\thetcblayer,
before=\par\smallskip,after=\par\smallskip},
every box on layer 2/.style={reset,every box,colback=yellow!10!white,
drop fuzzy shadow}}
即watermark text=\thetcblayer,表示背景中有水印,在本例中为 tcolorbox 图层编号。如果不想要,则应将其删除。
\documentclass[slides]{beamer}
%\documentclass[a4wide,8pt]{extarticle}
\mode<presentation>{}
%Define usepackages
\usetheme{default}
\usepackage[utf8]{inputenc}
\usepackage{amsfonts}
\usepackage{graphicx} % for pdf, bitmapped graphics files
\usepackage{times} % assumes new font selection scheme installed
\usepackage{amsmath} %assumes amsmath package installed
\usepackage{amssymb}
\usepackage{amsfonts} % assumes amsmath package installed
%\usepackage{color}
\usepackage{commath}
\usepackage{breqn}
\usepackage{tcolorbox}
\usepackage{hyperref}
\hypersetup{linkbordercolor=green}
%Define colors
%\definecolor{blue}{rgb}{0,0,1}
% %preamble and title page
\setbeamersize{text margin left = 0.2mm}
\setbeamersize{text margin right = 0.2mm}
\setbeamersize{sidebar width left= 0.3mm}
\setbeamersize{sidebar width right= 0.3mm}
\setbeamertemplate{itemize item}[triangle]
\setbeamertemplate{itemize subitem}[triangle]
%\setbeamercovered{transparent}
%\setbeamertemplate{navigation symbols}{}
%\setbeamertemplate{headline}
\tcbuselibrary{skins,breakable}
% Color Box layers
\tcbset{colframe=blue!75!black,fonttitle=\bfseries,
colback=green!5!white,
every box/.style={enhanced,%watermark text=\thetcblayer,
before=\par\smallskip,after=\par\smallskip},
every box on layer 2/.style={reset,every box,colback=yellow!10!white,
drop fuzzy shadow}}
% Newt Color Box
\newtcolorbox{pabox}[1]{colback=red!5!white,
colframe=green!75!black,fonttitle=\bfseries,
title=#1}
%My green box
\newtcolorbox{mygreenbox}[2][]{%
enhanced,width=\linewidth-6pt,
enlarge top by=3pt,enlarge bottom by=3pt,
enlarge left by=3pt,enlarge right by=3pt,
title={#2},frame hidden,boxrule=0pt,top=1mm,bottom=1mm,
colframe=green!30!black, colbacktitle=green!50!yellow,
coltitle=black, colback=green!25!white,
borderline={0.5pt}{-0.5pt}{green!75!blue},
borderline={1pt}{-3pt}{green!50!blue},#1}
\begin{document}
\long\def\/*#1*/{} % Define block comment
% This starts Page 3
\begin{frame}{\textcolor{cyan}{\small Non-Lipschitzian Dynamics of a Continuous FTS Feedback Controller}}
\begin{tcolorbox}[title = \small Overview of Problem]
\begin{itemize}
\item\tiny\color{blue} The design of FTS continuous time-invariant feedback controllers involve non-Lipschitzian closed-loop dynamics
\item Such controllers will exhibit non-unique solutions in backward time, i.e., better robustness and good disturbance rejection
\item Such non-unique (revert time) solutions would violate uniqueness conditions for Lipschitz differential equations
\end{itemize}
\begin{pabox}{\small Statement of Problem}
\begin{itemize}
\item\tiny\color{blue} Consider a rigid body rotating under the action of a mechanical torque about a fixed axis
\item Its equations of motion resemble those of a double integrator. States differ by $2n\pi$ (where $n = 0, 1, 2, \hdots$) in angular modes which correspond to the same physical configuration of the body.
\item State space for this system is $S^1 \times \mathbb{R}$ rather than $ \mathbb{R}^2$ \cite{Andronov}
\item Developing stabilizing controls for the double integrator on $ \mathbb{R}^2$ (translational double integrator) will lead to unwinding since the configuration space is actually $ \mathbb{R}$
\item This makes an interesting problem when designing feedback controllers for the rotational double integrator with anti-wind-up compensation
\item Discontinuous feedback controllers are practically infeasible due to the chattering they introduce because of plant uncertainties
\item They could also excite high-frequency dynamics when used in controlling lightly damped structures \cite{Baruh et. al.}
\end{itemize}
\end{pabox}
\end{tcolorbox}
\end{frame}
\end{document}
编辑
我删除了一些不必要的代码/语句,例如,\usepackage{xcolor}因为它已经被tcolorbox和加载\definecolor{blue},因为blue它已经是一种众所周知的颜色。
声明\color{cyan}已改为\textcolor{cyan}{...}
