

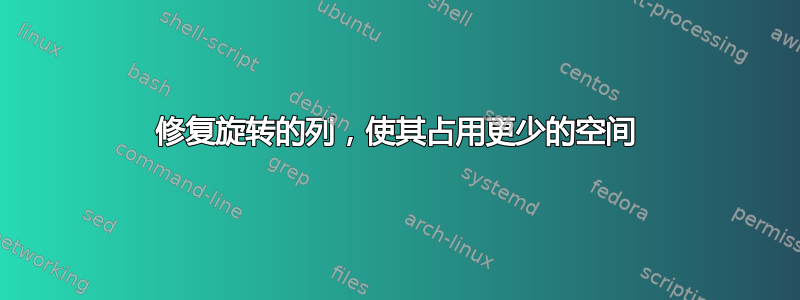
我今天有一个相机准备的截止日期。我该如何修复下表,使列固定并且占用更少的空间?这是 CVPR 2019 会议。
\newcommand{\rb}[1]{\rotatebox{80}{#1}}%
\begin{table*}[ht]
% \centering
\begin{tabular}{rrrc|ccccccccc}
Dataset & \multicolumn{1}{p{0.1cm}}{\centering \# \\objects} & \multicolumn{1}{p{0.1cm}}{\centering \# \\frames} & Description &
\rb{depth} & \rb{stereo} & \rb{\multicolumn{1}{p{0.5cm}}{\centering 3D \\ pose}} &
\rb{\multicolumn{1}{p{0.5cm}}{\centering full \\ rotation}} & \rb{occlusion} & \rb{\multicolumn{1}{p{0.5cm}}{\centering extreme \\ lighting}} &
\rb{\multicolumn{1}{p{0.5cm}}{\centering segment \\ ation}} & \rb{\multicolumn{1}{p{0.5cm}}{\centering bbox \\ coords}} & \rb{\multicolumn{1}{p{0.5cm}}{\centering flying \\ distractors}} \\
\hline
UW RGB~\cite{lai2011large} & 300 & 250k & various &
\cmark & \xmark & \cmark & \cmark & \xmark & \xmark & \xmark & \xmark & \xmark \\
LINEMOD~\cite{hinterstoisser2012model} & 15 & 18k & various &
\cmark & \xmark & \cmark & \cmark & \xmark & \xmark & \xmark & \xmark & \xmark \\
Pascal3D+~\cite{xiang2014beyond} & 12 & 30k & various &
\xmark & \xmark & \cmark & \xmark & \cmark & \cmark & \xmark & \xmark & \xmark \\
% Brachman et al.~\cite{brachmann2014learning} & 20 & 10k & various &
% \cmark & \xmark & \cmark & \cmark & \cmark & \cmark & \xmark & \xmark & \xmark \\
Rutgers APC~\cite{rennie2016dataset} & 24 & 10k & warehouse &
\cmark & \xmark & \cmark & \xmark & \xmark & \xmark & \xmark & \xmark & \xmark \\
T-LESS~\cite{hodan2017t} & 30 & 10k & industrial &
\cmark & \xmark & \cmark & \cmark & \cmark & \xmark & \xmark & \xmark & \xmark \\
YCB Video~\cite{xiang2017posecnn} & 21 & 134k & household &
\cmark & \xmark & \cmark & \cmark & \cmark & \xmark & \cmark & \cmark & \xmark \\
Falling Things~\cite{tremblay2018falling} & 21 & 60k & household &
\cmark & \cmark & \cmark & \cmark & \cmark & \cmark & \cmark & \cmark & \xmark \\
SIDOD & 21 & 144k & household &
\cmark & \cmark & \cmark & \cmark & \cmark & \cmark & \cmark & \cmark & \cmark \\
&
\end{tabular}
\caption{Object pose and detection datasets with at least 10,000 frames.} %TODO: finish caption.}
\label{tab:comparison}
\end{table*}
目前它看起来如下所示(就像 3D 姿势和绿色复选标记之间有很多空间。此外,# 个对象和 # 个框架粘在一起。

答案1
看看你是否喜欢以下解决方案:

- 用于表环境
tabularx - 对于头部使用宏
\thead和\rothead来自包makecell 旋转的头部是正交的(为了更好的间距)
\documentclass[twocolumn]{article} \usepackage{rotating} % \usepackage{subfig} \usepackage{amssymb}% http://ctan.org/pkg/amssymb \usepackage{pifont}% http://ctan.org/pkg/pifont \newcommand{\cmark}{\ding{51}}% \newcommand{\xmark}{\ding{55}}% \usepackage{array, booktabs, makecell, tabularx} \renewcommand\theadfont{\small\linespread{0.84}\selectfont} \usepackage{siunitx} \begin{document} \begin{table*}[ht] \small \settowidth\rotheadsize{\theadfont distracters} \renewcommand\rotheadgape{} \renewcommand\arraystretch{1.1} \setlength\tabcolsep{3pt} \begin{tabularx}{\linewidth}{ @{} r S[table-format=3.0] S[table-format=3.0, table-space-text-post={k}]<{\,k} l | *{9}{>{\centering\arraybackslash}X} @{} } \hline \thead[b]{Dataset} & {\thead[b]{\# \\objects}} & \multicolumn{1}{c}{\thead[b]{\# \\frames}} & \thead[b]Description & \rothead{depth} & \rothead{stereo} & \rothead{3D \\ pose} & \rothead{full\\ rotation} & \rothead{occlusion} & \rothead{extreme\\ lighting} & \rothead{segment\\ action} & \rothead{bbox\\ coords} & \rothead{flying\\ distracters} \\ \hline UW RGB~\cite{lai2011large} & 300 & 250 & various & \cmark & \xmark & \cmark & \cmark & \xmark & \xmark & \xmark & \xmark & \xmark \\ LINEMOD~\cite{hinterstoisser2012model} & 15 & 18 & various & \cmark & \xmark & \cmark & \cmark & \xmark & \xmark & \xmark & \xmark & \xmark \\ Pascal3D+~\cite{xiang2014beyond} & 12 & 30 & various & \xmark & \xmark & \cmark & \xmark & \cmark & \cmark & \xmark & \xmark & \xmark \\ Rutgers APC~\cite{rennie2016dataset} & 24 & 10 & warehouse & \cmark & \xmark & \cmark & \xmark & \xmark & \xmark & \xmark & \xmark & \xmark \\ T-LESS~\cite{hodan2017t} & 30 & 10 & industrial & \cmark & \xmark & \cmark & \cmark & \cmark & \xmark & \xmark & \xmark & \xmark \\ YCB Video~\cite{xiang2017posecnn} & 21 & 134 & household & \cmark & \xmark & \cmark & \cmark & \cmark & \xmark & \cmark & \cmark & \xmark \\ Falling Things~\cite{tremblay2018falling} & 21 & 60 & household & \cmark & \cmark & \cmark & \cmark & \cmark & \cmark & \cmark & \cmark & \xmark \\ SIDOD & 21 & 144 & household & \cmark & \cmark & \cmark & \cmark & \cmark & \cmark & \cmark & \cmark & \cmark