

我想将表格内的所有文本水平和垂直居中,例如在示例代码中,文本“角速度”垂直和水平地位于其单元格的中心,而列的宽度没有变化(第1列和第3列的宽度为2厘米,第2列和第4列的宽度为5厘米)。
\documentclass{article}
\usepackage{amsmath}
\usepackage{amsfonts}
\usepackage{mathrsfs}
\usepackage{caption}
\usepackage{mathtools,amssymb}
\usepackage{amsthm,amssymb}
\usepackage{bm}
\begin{document}
\begin{table}[h]
\begin{center}
\renewcommand{\arraystretch}{1.35}
\captionsetup{justification=centering}
\caption{
{List of variables}
}
\label{tbl: List of variables}
\begin{tabular}{|p{20mm}|p{50mm}|p{20mm}|p{50mm}|}
\noalign{\hrule height 2pt}
Variables & Definition & Variables & Definition \\
\noalign{\hrule height 2pt}
$\mathbf{J} $ & moment of inertia matrix &$\mathbf{C}_{L/B}$ & Direction Cosine Matrix \\
\hline
$\bm{q}$&quaternion vector&$\bm{\omega}_{L/B}$& angular velocity relative to LVLH coordinate system expressed in BFCS \\
\hline
$\mathbf{M}$& augmented skew-symmetric matrix &$\sum{T}_{ext}$ & total external torque \\
\hline
$\mathbf{h}_B$ &angular momentum vector& $\bm{\omega}_{E/B}$& angular velocity relative to ECI coordinate system expressed in BFCS \\
\hline
$\omega_{wx}$, $\omega_{wy}$, $\omega_{wz}$ & angular velocity of the RWs &$I_w$ & MOI of the RWs \\
\hline
$\omega_{j}$& angular velocity& $\bm{\omega}_{E/L}$ & the satellite's angular velocity relative to LVLH coordinate system with respect to ECI \\
\hline
$\bm{x}$&state vector & $\bm{u}$ & control torque vector\\
\hline
$T_s$ & sampling time & $T_x$, $T_y$, $T_z$ & applied torques \\
\hline
$\alpha$, $\beta$ & fractional-order parameters & $\mathbf{Q}$, $\mathbf{R}$&weighting matrices\\
\hline
$\omega_{x}$, $\omega_{y}$, $\omega_{z}$& satellite angular velocity& $\bm{\omega}^\times_{L/B}$& the skew-symmetric matrix of the angular velocity \\
\hline
$\bm{T}_{dis}$&disturbance torque&$v$&the velocity of the satellite\\
\hline
$r$& the position of the satellite&&
\\
\noalign{\hrule height 2pt}
\end{tabular}
\end{center}
\end{table}
\end{document}
'''
答案1
- 您的表格比默认分页
\textwidth定义的要宽。——您可以考虑通过在文档前言中添加“\usepackage{geometry}”来增加它。article - 简单的代码,可以使用包来编写所需的表格格式
tabularray:
\documentclass{article}
%---------------- show page layout. don't use in a real document!
\usepackage{showframe}
\renewcommand\ShowFrameLinethickness{0.15pt}
\renewcommand*\ShowFrameColor{\color{red}}
%---------------------------------------------------------------%
\usepackage{lipsum}% For dummy text. Don't use in a real document
\usepackage{mathrsfs}
\usepackage{caption}
\usepackage{bm}
\usepackage{tabularray}
\begin{document}
\begin{table}[h]
\caption{List of variables}
\label{tbl: List of variables}
\begin{tblr}{hline{1,2,Z} = 1pt, hline{3-Y}, vlines,
colspec = {*{2}{Q[c,m, mode=math] X[c,m]} },
colsep = 4pt,
row{1} = {mode=text}
}
Variables & Definition
& Variables
& Definition \\
\mathbf{J} & moment of inertia matrix
& \mathbf{C}_{L/B}
& Direction Cosine Matrix \\
\bm{q} & cquaternion vector
& \bm{\omega}_{L/B}
& angular velocity relative to LVLH coordinate system expressed in BFCS \\
\mathbf{M} & augmented skew-symmetric matrix
& \sum{T}_{\mathrm{ext}}
& total external torque \\
\mathbf{h}_B & angular momentum vector
& \bm{\omega}_{E/B}
& angular velocity relative to ECI coordinate system expressed in BFCS \\
\omega_{wx}, \omega_{wy}, \omega_{wz}
& angular velocity of the RWs
& I_w
& MOI of the RWs \\
\omega_{j} & angular velocity
& \bm{\omega}_{E/L}
& the satellite's angular velocity relative to LVLH coordinate system with respect to ECI \\
\bm{x} & state vector
& \bm{u}
& control torque vector \\
T_s & sampling time
& T_x, T_y, T_z
& applied torques \\
\alpha, \beta & fractional-order parameters
& \mathbf{Q}, \mathbf{R}
& weighting matrices \\
\omega_{x}, \omega_{y}, \omega_{z}
& satellite angular velocity
& \bm{\omega}^\times_{L/B}
& the skew-symmetric matrix of the angular velocity \\
\bm{T}_{dis} & disturbance torque
& v & the velocity of the satellite \\
r & the position of the satellite
& & \\
\end{tblr}
\end{table}
\end{document}

编辑:
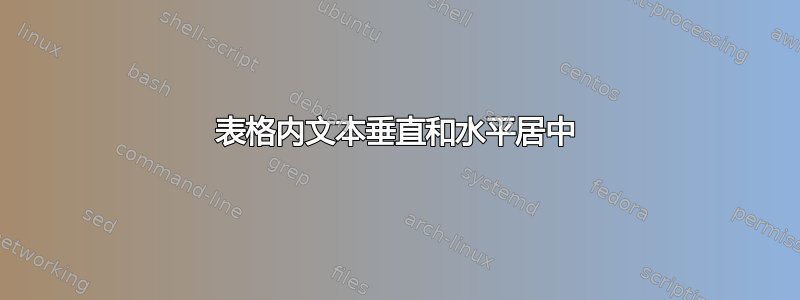
顺便说一句,我认为如果单元格内容左对齐,而不是垂直居中,省略所有垂直线,并且对于水平规则使用booktabs第一、第二和最后一条规则,表格会更漂亮(看起来更专业):
\documentclass{article}
%\usepackage{geometry}
%---------------- show page layout. don't use in a real document!
\usepackage{showframe}
\renewcommand\ShowFrameLinethickness{0.15pt}
\renewcommand*\ShowFrameColor{\color{red}}
%---------------------------------------------------------------%
\usepackage{lipsum}% For dummy text. Don't use in a real document
\usepackage{mathrsfs}
\usepackage{caption}
\usepackage{bm}
\usepackage{tabularray}
\UseTblrLibrary{booktabs}
\begin{document}
\begin{table}[ht]
\caption{List of variables}
\label{tbl: List of variables}
\begin{tblr}{colsep = 4pt,
colspec = {@{} *{2}{Q[l, mode=math] X[l, font=\linespread{0.88}\selectfont} @{}},
row{1} = {mode=text}
row{2-Z} = {rowsep=3pt}
}
\toprule
Variables & Definition
& Variables
& Definition \\
\midrule
\mathbf{J} & moment of inertia matrix
& \mathbf{C}_{L/B}
& Direction Cosine Matrix \\
\bm{q} & cquaternion vector
& \bm{\omega}_{L/B}
& angular velocity relative to LVLH coordinate system expressed in BFCS \\
\mathbf{M} & augmented skew-symmetric matrix
& \sum{T}_{\mathrm{ext}}
& total external torque \\
\mathbf{h}_B & angular momentum vector
& \bm{\omega}_{E/B}
& angular velocity relative to ECI coordinate system expressed in BFCS \\
\omega_{wx}, \omega_{wy}, \omega_{wz}
& angular velocity of the RWs
& I_w
& MOI of the RWs \\
\omega_{j} & angular velocity
& \bm{\omega}_{E/L}
& the satellite's angular velocity relative to LVLH coordinate system with respect to ECI \\
\bm{x} & state vector
& \bm{u}
& control torque vector \\
T_s & sampling time
& T_x, T_y, T_z
& applied torques \\
\alpha, \beta & fractional-order parameters
& \mathbf{Q}, \mathbf{R}
& weighting matrices \\
\omega_{x}, \omega_{y}, \omega_{z}
& satellite angular velocity
& \bm{\omega}^\times_{L/B}
& the skew-symmetric matrix of the angular velocity \\
\bm{T}_{dis} & disturbance torque
& v & the velocity of the satellite \\
r & the position of the satellite
& & \\
\bottomrule
\end{tblr}
\end{table}
\end{document}

(红线表示页面布局)
答案2
对于垂直和水平居中的文本,我们可以使用{\centering\arraybackslash}m{width}with 包array。以及用于垂直和水平烧灼文本的代码:
\documentclass{article}
\usepackage{amsmath}
\usepackage{amsfonts}
\usepackage{mathrsfs}
\usepackage{caption}
\usepackage{mathtools,amssymb}
\usepackage{amsthm,amssymb}
\usepackage{bm}
\usepackage{array}
\begin{document}
\begin{table}[h]
\begin{center}
\renewcommand{\arraystretch}{1.35}
\captionsetup{justification=centering}
\caption{
{List of variables}
}
\label{tbl: List of variables}
\begin{tabular}{|>{\centering\arraybackslash}m{.2\linewidth}|>{\centering\arraybackslash}m{0.4\linewidth}|>{\centering\arraybackslash}m{.2\linewidth}|>{\centering\arraybackslash}m{.4\linewidth}|}
\noalign{\hrule height 2pt}
Variables & Definition & Variables & Definition \\
\noalign{\hrule height 2pt}
$\mathbf{J} $ & moment of inertia matrix &$\mathbf{C}_{L/B}$ & Direction Cosine Matrix \\
\hline
$\bm{q}$&quaternion vector&$\bm{\omega}_{L/B}$& angular velocity relative to LVLH coordinate system expressed in BFCS \\
\hline
$\mathbf{M}$& augmented skew-symmetric matrix &$\sum{T}_{ext}$ & total external torque \\
\hline
$\mathbf{h}_B$ &angular momentum vector& $\bm{\omega}_{E/B}$& angular velocity relative to ECI coordinate system expressed in BFCS \\
\hline
$\omega_{wx}$, $\omega_{wy}$, $\omega_{wz}$ & angular velocity of the RWs &$I_w$ & MOI of the RWs \\
\hline
$\omega_{j}$& angular velocity& $\bm{\omega}_{E/L}$ & the satellite's angular velocity relative to LVLH coordinate system with respect to ECI \\
\hline
$\bm{x}$&state vector & $\bm{u}$ & control torque vector\\
\hline
$T_s$ & sampling time & $T_x$, $T_y$, $T_z$ & applied torques \\
\hline
$\alpha$, $\beta$ & fractional-order parameters & $\mathbf{Q}$, $\mathbf{R}$&weighting matrices\\
\hline
$\omega_{x}$, $\omega_{y}$, $\omega_{z}$& satellite angular velocity& $\bm{\omega}^\times_{L/B}$& the skew-symmetric matrix of the angular velocity \\
\hline
$\bm{T}_{dis}$&disturbance torque&$v$&the velocity of the satellite\\
\hline
$r$& the position of the satellite&&
\\
\noalign{\hrule height 2pt}
\end{tabular}
\end{center}
\end{table}
\end{document}
