canbus
SocketCAN如何获取操作结果
是否可以获取 CAN 操作的状态? 操作示例: write(socket, &frame, sizeof(frame)); 是否可以使用 SocketCAN 检查帧是否已 ACK 或获取任何其他 CAN 状态信息? ...
是否可以获取 CAN 操作的状态? 操作示例: write(socket, &frame, sizeof(frame)); 是否可以使用 SocketCAN 检查帧是否已 ACK 或获取任何其他 CAN 状态信息? ...
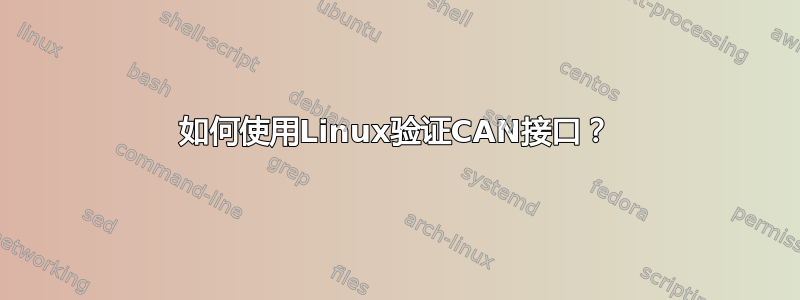
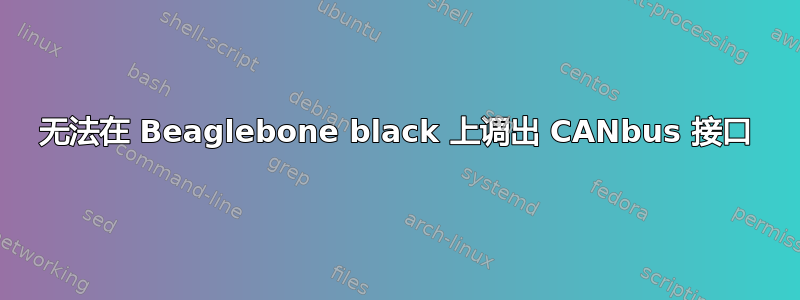
![ip link set can0 type 可以提供帮助 用法: ip link set DEVICE type can [ 比特率 BITRATE [ 采样点 SAMPLE-POINT] ] | [ tq TQ prop-seg PROP_SEG 相位段 1 相位段 1 相位段 2 相位段 2 [ sjw SJW ] ] [ dbitrate BITRATE [ dsample-point SAMPLE-POINT] ] | [ dtq TQ dprop-seg PROP_SEG dphase-seg1 PHASE-SEG1 dphase-seg2 PHASE-SEG2 [ dsjw SJW ] ] [ tdcv TDCV tdco TDCO tdcf TDCF ] [ 环回 { 上 | }关 } ] [ 只听 { 开 |关 } ] [ 三重采样 { 开 |关 } ] [ 一次性 { 开 | 关关闭 } ] [ berr 报告 { 开启 | 关闭关 } ] [ fd { 开 |关 } ] [ fd-non-iso { 开 | 关关 } ] [ 假定确认 { 开 |关 } ] [ cc-len8-dlc { 开 |关闭 } ] [ tdc 模式 { 自动 | 关闭手册| off } ] [ restart-ms TIME-MS ] [ restart ] [ 终止 { 0..65535 } ] 其中: BITRATE := { NUMBER in bps } SAMPLE-POINT := { 0.000..0.999 } TQ := { NUMBER in bps ns } PROP-SEG := { tq 中的数字 } PHASE-SEG1 := { tq 中的数字 } PHASE-SEG2 := { tq 中的数字 } SJW := { tq 中的数字 } TDCV := { tc 中的数字 } TDCO : = { tc 中的数字 } TDCF := { tc 中的数字 } 重新启动 MS := { 0 |数字(以毫秒为单位)}](https://linux22.com/image/225338/ip%20link%20set%20can0%20type%20%E5%8F%AF%E4%BB%A5%E6%8F%90%E4%BE%9B%E5%B8%AE%E5%8A%A9%20%E7%94%A8%E6%B3%95%EF%BC%9A%20ip%20link%20set%20DEVICE%20type%20can%20%5B%20%E6%AF%94%E7%89%B9%E7%8E%87%20BITRATE%20%5B%20%E9%87%87%E6%A0%B7%E7%82%B9%20SAMPLE-POINT%5D%20%5D%20%7C%20%5B%20tq%20TQ%20prop-seg%20PROP_SEG%20%E7%9B%B8%E4%BD%8D%E6%AE%B5%201%20%E7%9B%B8%E4%BD%8D%E6%AE%B5%201%20%E7%9B%B8%E4%BD%8D%E6%AE%B5%202%20%E7%9B%B8%E4%BD%8D%E6%AE%B5%202%20%5B%20sjw%20SJW%20%5D%20%5D%20%5B%20dbitrate%20BITRATE%20%5B%20dsample-point%20SAMPLE-POINT%5D%20%5D%20%7C%20%5B%20dtq%20TQ%20dprop-seg%20PROP_SEG%20dphase-seg1%20PHASE-SEG1%20dphase-seg2%20PHASE-SEG2%20%5B%20dsjw%20SJW%20%5D%20%5D%20%5B%20tdcv%20TDCV%20tdco%20TDCO%20tdcf%20TDCF%20%5D%20%5B%20%E7%8E%AF%E5%9B%9E%20%7B%20%E4%B8%8A%20%7C%20%7D%E5%85%B3%20%7D%20%5D%20%5B%20%E5%8F%AA%E5%90%AC%20%7B%20%E5%BC%80%20%7C%E5%85%B3%20%7D%20%5D%20%5B%20%E4%B8%89%E9%87%8D%E9%87%87%E6%A0%B7%20%7B%20%E5%BC%80%20%7C%E5%85%B3%20%7D%20%5D%20%5B%20%E4%B8%80%E6%AC%A1%E6%80%A7%20%7B%20%E5%BC%80%20%7C%20%E5%85%B3%E5%85%B3%E9%97%AD%20%7D%20%5D%20%5B%20berr%20%E6%8A%A5%E5%91%8A%20%7B%20%E5%BC%80%E5%90%AF%20%7C%20%E5%85%B3%E9%97%AD%E5%85%B3%20%7D%20%5D%20%5B%20fd%20%7B%20%E5%BC%80%20%7C%E5%85%B3%20%7D%20%5D%20%5B%20fd-non-iso%20%7B%20%E5%BC%80%20%7C%20%E5%85%B3%E5%85%B3%20%7D%20%5D%20%5B%20%E5%81%87%E5%AE%9A%E7%A1%AE%E8%AE%A4%20%7B%20%E5%BC%80%20%7C%E5%85%B3%20%7D%20%5D%20%5B%20cc-len8-dlc%20%7B%20%E5%BC%80%20%7C%E5%85%B3%E9%97%AD%20%7D%20%5D%20%5B%20tdc%20%E6%A8%A1%E5%BC%8F%20%7B%20%E8%87%AA%E5%8A%A8%20%7C%20%E5%85%B3%E9%97%AD%E6%89%8B%E5%86%8C%7C%20off%20%7D%20%5D%20%5B%20restart-ms%20TIME-MS%20%5D%20%5B%20restart%20%5D%20%5B%20%E7%BB%88%E6%AD%A2%20%7B%200..65535%20%7D%20%5D%20%E5%85%B6%E4%B8%AD%EF%BC%9A%20BITRATE%20%3A%3D%20%7B%20NUMBER%20in%20bps%20%7D%20SAMPLE-POINT%20%3A%3D%20%7B%200.000..0.999%20%7D%20TQ%20%3A%3D%20%7B%20NUMBER%20in%20bps%20ns%20%7D%20PROP-SEG%20%3A%3D%20%7B%20tq%20%E4%B8%AD%E7%9A%84%E6%95%B0%E5%AD%97%20%7D%20PHASE-SEG1%20%3A%3D%20%7B%20tq%20%E4%B8%AD%E7%9A%84%E6%95%B0%E5%AD%97%20%7D%20PHASE-SEG2%20%3A%3D%20%7B%20tq%20%E4%B8%AD%E7%9A%84%E6%95%B0%E5%AD%97%20%7D%20SJW%20%3A%3D%20%7B%20tq%20%E4%B8%AD%E7%9A%84%E6%95%B0%E5%AD%97%20%7D%20TDCV%20%3A%3D%20%7B%20tc%20%E4%B8%AD%E7%9A%84%E6%95%B0%E5%AD%97%20%7D%20TDCO%20%3A%20%3D%20%7B%20tc%20%E4%B8%AD%E7%9A%84%E6%95%B0%E5%AD%97%20%7D%20TDCF%20%3A%3D%20%7B%20tc%20%E4%B8%AD%E7%9A%84%E6%95%B0%E5%AD%97%20%7D%20%E9%87%8D%E6%96%B0%E5%90%AF%E5%8A%A8%20MS%20%3A%3D%20%7B%200%20%7C%E6%95%B0%E5%AD%97%EF%BC%88%E4%BB%A5%E6%AF%AB%E7%A7%92%E4%B8%BA%E5%8D%95%E4%BD%8D%EF%BC%89%7D.png)
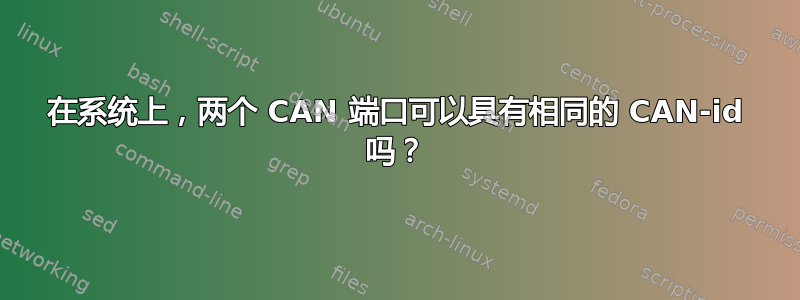
我需要为 CANFD 总线设置采样点。以下帮助命令显示了如何为 can 设置样本点,但我的 can 配置未显示任何样本点参数 ip link set can0 type 可以提供帮助 用法: ip link set DEVICE type can [ 比特率 BITRATE [ 采样点 SAMPLE-POINT] ] | [ tq TQ prop-seg PROP_SEG 相位段 1 相位段 1 相位段 2 相位段 2 [ sjw SJW ] ] [ dbitrate BITRATE [ dsample-point SAMPLE-POINT] ] | [ d...

我正在尝试读取驱动程序内的 socketCAN 设备。 我正在设置一个 skb 并将其与相关信息一起传递给can_rx_register注册名为 的回调的调用sc_rcv。 // callback static void sc_rcv(struct sk_buff *skbr, void *data) // initialization result = can_rx_register(&init_net, dev, 10 | CAN_INV_FILTER, CAN_SFF_MASK, &sc_rcv, skb, "mycan", 0); ...
我想验证嵌入式系统上的 CAN 接口。它有两个 CAN 端口:can0和can1。 我按照以下顺序将它们都提出来: # ip link set can0 type can bitrate 1000000 dbitrate 2000000 fd on # ip link set can0 up # ip link set can1 type can bitrate 1000000 dbitrate 2000000 fd on # ip link set can1 up 我将它们相互连接起来(CANH<-> CANH、CANL<->CA...
Waveshare 为 Raspberry Pi 制作了一个很棒的 CAN HAT(请参阅这里),但该说明仅适用于 Raspberry Pi OS,不适用于 Armbian。 Banana Pi BPI-M2 Zero 具有与 Raspberry Pi 相同的引脚布局,但运行 Armbian。如何使用 Armbian 的覆盖系统设置 Waveshare CAN HAT? ...
%20Linux%204.19.94-ti-r42%20%E4%B8%8A%E7%9A%84%20can%E3%80%81can-dev%20%E5%86%85%E6%A0%B8%E6%A8%A1%E5%9D%97%E7%9A%84%E4%BF%A1%E6%81%AF.png)
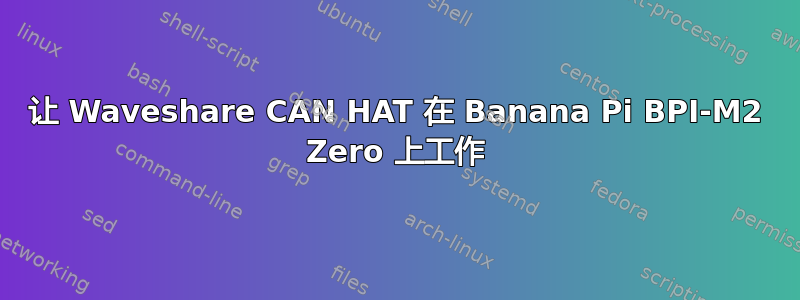
我似乎缺少几个内核模块。具体来说,can并且can_dev。当我运行modprobe can或 时,模块不会加载modprobe can-dev。 我认为这是因为模块不在目录中 [/lib/modules/4.19.94-ti-r42/kernel/drivers/net/can]$ ls slcan.ko.xz spi usb vcan.ko.xz 唯一加载的 CAN 模块是can_raw,它似乎与 SocketCAN 一起工作得很好。我的问题是我正在尝试使用价值CAN这取决于 2 个模块。 我尝试下载内核,当我运行时menuconfig,我没有看...
我有一个 PEAK canbus 适配器 (USB) 连接到我的 Linux 盒子,可以从 Qt C++ 程序访问。虽然一切正常,但当我收到帧时,它们都是 SFF(11 位)ID。 candump 都是 11 位 ID。即使我发送 EFF(29 位)帧,它也只显示 SFF 中的传入帧。 如果我使用 candump,也会发生同样的情况,所有帧都显示 SFF ID。 然而,当我将笔记本电脑切换到 Windows 并运行 PEAK 查看器,然后返回 Linux 后,突然我的帧全部显示在 candump 中的 EFF 中。 我需要设置什么(在 Linux/ip co...
我有多个类似的 USB 网络设备,在这种情况下 CAN(can0 和 can1)连接到不同的网络,但我认为这与多个其他网络(例如 WiFi、以太网等)有类似的问题。这些当前显示为 can0 和 can1,我可能会连接更多。 我试图在访问每个位置的位置保持某种持久性。对于使用 udev 的非网络设备,允许将自定义符号链接引用到 idVendor、idProduct 和序列号,以便我可以确保正确的代码访问正确的设备。 ifconfig 下的设备如何实现类似的持久性?我有每个 ID 和序列详细信息可供参考 我不希望设备 x 始终为 can0 而设备 y 始终为 c...
我已经配置了一个 SocketCAN 接口can0(使用 确认工作can-utils)。我有以下.network配置文件,以便systemd-networkd在启动时显示界面。 #/etc/systemd/network/80-can.network [Match] Name=can0 [CAN] BitRate=250K RestartSec=100ms [Link] Unmanaged=no RequiredForOnline=yes 启动后,我可以看到接口已启动(注意UP标志设置) $ ip link show can0 5: can0: <...

有人有在 Virtualbox 中使用 SocketCAN 的经验吗?我用的是Xubuntu。我首先对 can、can_raw、can_dev 以及我正在使用的特定 can 模块的相关驱动程序进行 modprobing。此外,我还指示 Virtualbox 通过我想要连接的 CAN-USB 设备。 当我运行命令时sudo ip link set can0 type can bitrate [bitrate],我得到:找不到设备“can0”。我检查了/dev,没有发现任何与CAN相关的内容。 我运行了一下sudo dmesg | grep 'usb',看起来它...
为了在启动时自动调出界面,我对文件进行了/etc/network/interfaces如下编辑: debian@beaglebone:~$ sudo nano /etc/network/interfaces 并在文件末尾添加以下内容: auto can1 iface can1 inet manual pre-up /sbin/ip link set can1 type can bitrate 250000 #triple-sampling on restart-ms 100 up /sbin/ifconfig can1 up down...
我有一个 USB/CAN 适配器,来自lsusb: OpenMoko, Inc. Geschwister 施耐德 CAN 适配器 它提供了一个套接字接口,来自ip addr: 5: can0: <NOARP,UP,LOWER_UP,ECHO> mtu 16 qdisc pfifo_fast state UP group default qlen 10 link/can 总线上还有其他设备不断发送数据。如果我重新启动电脑,我将无法再发送/接收数据,因为出现以下错误: 没有可用的缓冲空间 我猜想,当设备与 PC“断开连接”时(因为它正在重...
如果有两个CAN口的设备有相同的CAN-id,会不会造成麻烦? 由于某种原因,网络是分开的,但两个网络的“主”应该是相同的。 编辑:在网络拓扑下方。 ("master") CAN-BUS 0 +----------+ +----------+ |------->| CAN-ID 2 | | |<------| +----------+ | CAN-ID 1 | | |<------| +----------+ +----------+ |-...
mcp251x我正在尝试在内核为 4.9.253-tegra 的 Linux 系统上安装驱动程序,我使用了以下命令: # modprobe mcp251x 我用命令检查了 # dmesg | grep mcp251x 但它没有显示任何内容。 驱动程序存在于文件夹中, /lib/modules/4.9.253-tegra/kernel/drivers/net/can/spi/mcp251x.ko 即使这样它也不会加载。 如何在这个内核版本中正确安装这个驱动? 编辑: 我使用jetson内核4.9.253-tegra 我用 modprobe 插入...

我正在使用 Lawicel CAN 适配器连接到传感器,并希望设置 udev 规则以避免手动 can 设置。 手册可以设置: sudo slcand -o -c -f -s6 /dev/ttyUSB0 slcan0 sudo ifconfig slcan0 up 运行candump slcan0通过打印数据表明连接有效。 因此,我正在遵循设置 udev 规则的指南关联。但这行不通。 udev规则是 # Lawicel CANUSB module ACTION=="add", ENV{ID_MODEL}=="CANUSB", ENV{SUBSYSTEM}==...